MPP 介绍与入门
MPP(Media Process Platform)媒体处理软件平台,分为 mpp-middleware 和 mpp-framework 两部分。mpp-middleware 是底层组件层,提供视频和音频的采集、处理、编码、解码等功能,支持硬件加速,适用于各种应用场景。mpp-framework 是面向应用层的多媒体框架,针对特定产品(如CDR、SDV)进行了API封装,简化了开发过程,但灵活性较差,适用性较为有限。MPP平台的核心功能包括视频音频的录制和播放,支持多通道、硬件加速、流媒体等,广泛应用于智能设备、车载系统、安防监控等领域。
MPP 平台在 menuconfig 中提供了丰富的配置选项,用户可以根据项目需求选择所需的组件、音频3A算法库、音视频编解码库等。select mpp sample 选项包含多个示例程序,覆盖不同功能,供用户编译和试用。示例源码展示了如何调用 MPP 平台的各类组件,帮助用户参考和开发自己的应用。
MPP 设计了一套功能多样的接口,涵盖视频和音视频的采集、处理、编码、解码等功能。下表是MPP提供的组件与功能:
| 功能 | 组件 |
|---|---|
| 组件管理和系统相关 | mpi_sys |
| 视频采集(v4l2) | mpi_vi |
| 视频采集(usbCamera) | mpi_uvc |
| ISP效果 | mpi_isp |
| 视频编码 | mpi_venc |
| osd叠加区域管理 | mpi_region |
| 音频采集 | mpi_ai |
| 音频编码 | mpi_aenc |
| 字幕编码(目前为gps信息) | mpi_tenc |
| 文件封装 | mpi_mux |
| 文件解封装 | mpi_demux |
| 视频解码 | mpi_vdec |
| 视频输出 | mpi_vo |
| 音频解码 | mpi_adec |
| 音频输出 | mpi_ao |
| 时钟管理 | mpi_clock |
MPP 配置
MPP 配置页
使用 make menuconfig 进入 SDK 应用配置界面,选择 Allwinner 选项

选择 eyesee-mpp
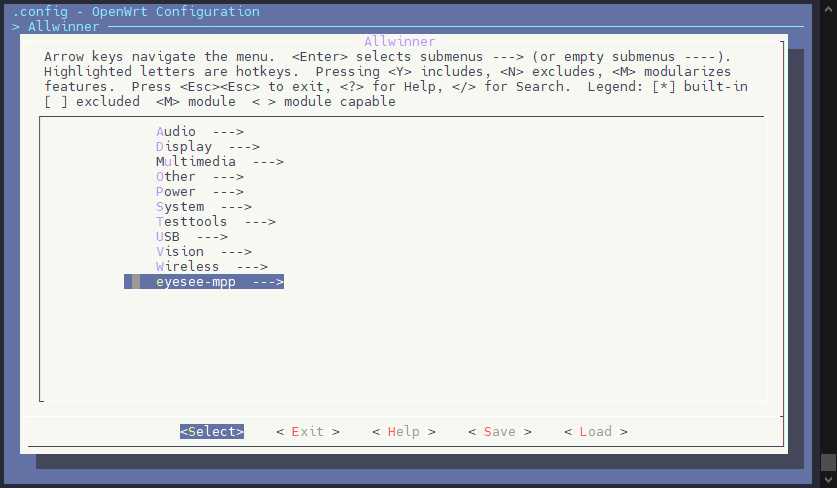
即可进入 MPP 的配置界面
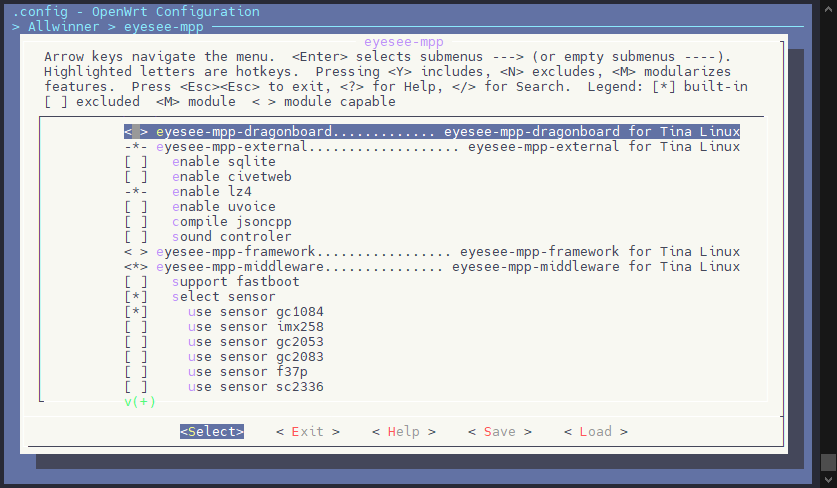
MPP 配置项说明
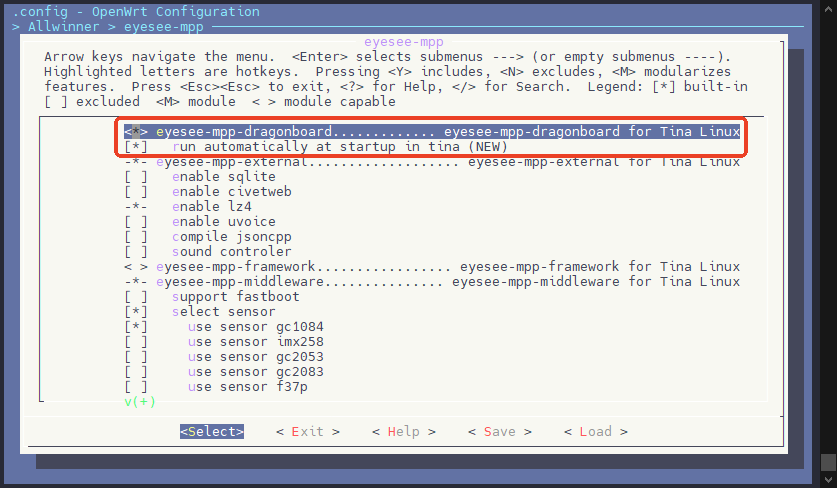
eyesee-mpp-dragonboard
MPP 产测工具,用于生产测试阶段,可以勾选 run automatically at startup in tina 选项自动运行方便产测,仅产测时需要使用。
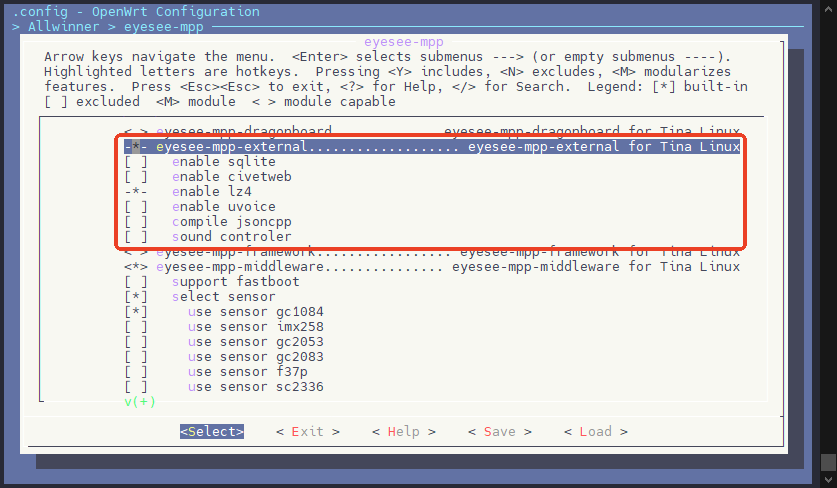
eyesee-mpp-external
MPP 模块的第三方库,用于给MPP提供基础支持,例如lz4,json支持。客户一般无需配置。
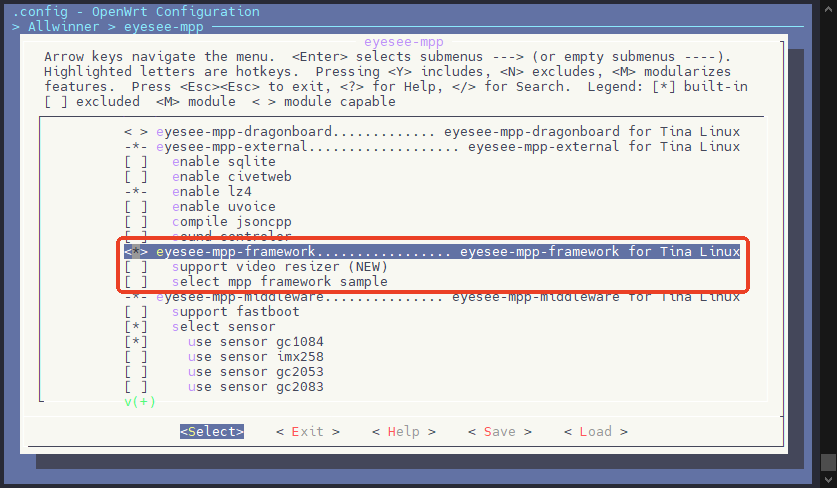
eyesee-mpp-framework
mpp-framework是全志自研产品CDR、SDV的app使用的多媒体框架,内部调用mpp-middleware层的各种组件完成相关功能。mpp-framework的API根据CDR,SDV等产品的使用场景定制
eyesee-mpp-middleware
mpp-middleware组件层。提供各类音视频的采集、处理、编码、解码等组件,ISP支持,客户需重点关注此部分内容
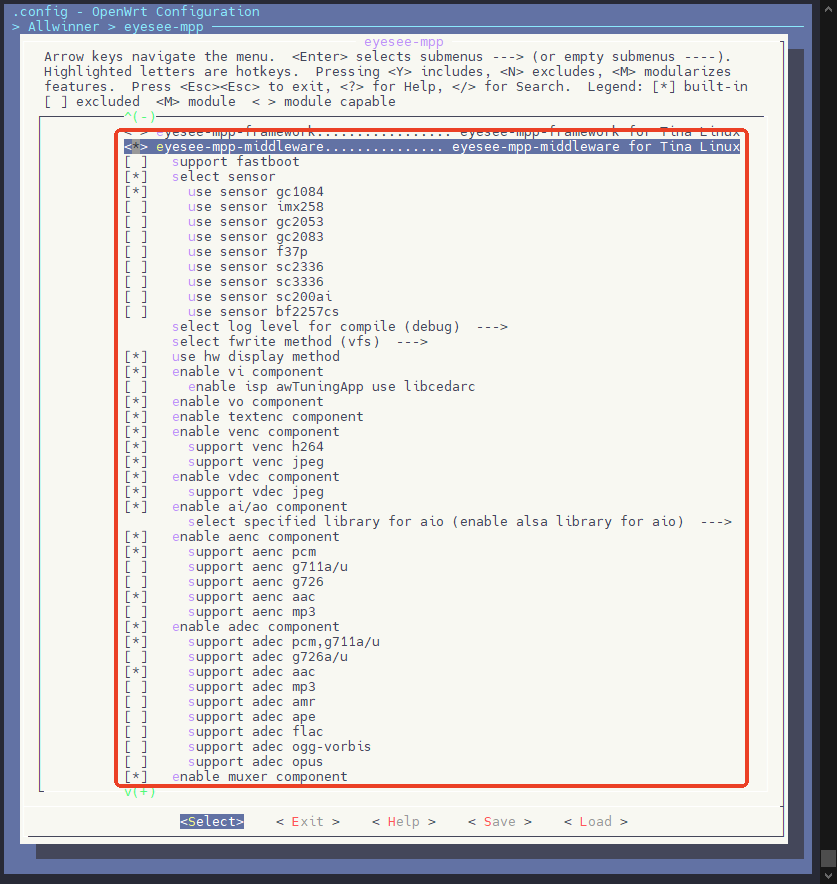
在eyesee-mpp-middleware中,提供了大量的示例Sample以供参考

eyesee-mpp-private
提供了 onvif,rtsp协议的支持库
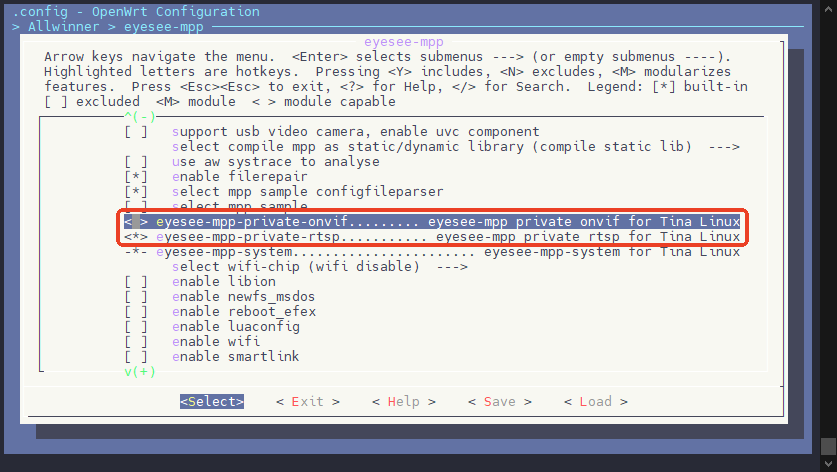
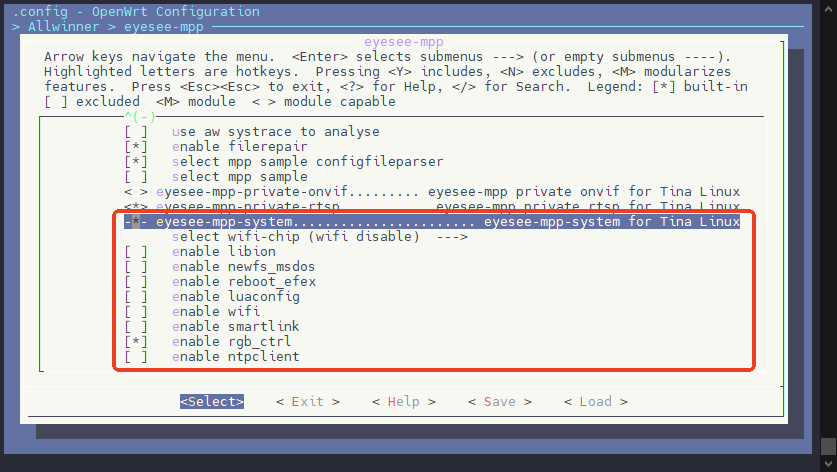
eyesee-mpp-system
提供系统控制相关功能
MPP 编译
这里以编译 MPP Sample sample_smartIPC_demo 为例,演示如何编译 MPP
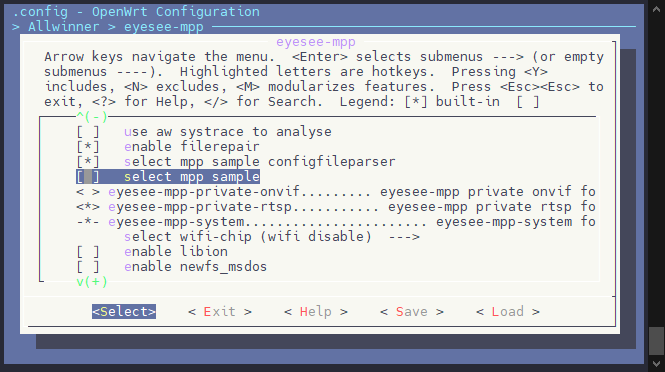
首先运行 MPP 配置页,找到 select mpp sample,按空格选中
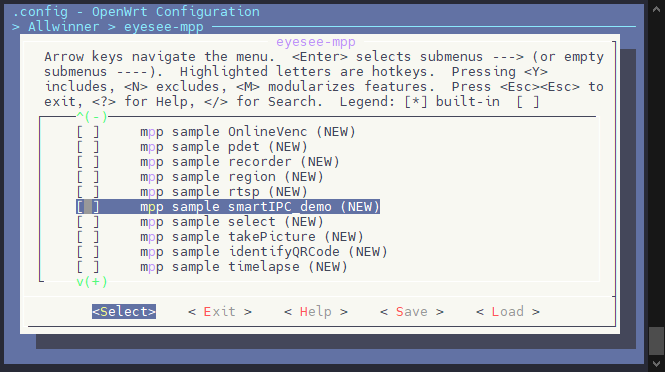
找到 mpp sample smartIPC_demo,按空格选中
退出配置页面,使用make命令编译 SDK,编译后的 sample 会在 platform/allwinner/eyesee-mpp/middleware/sun300iw1/sample/bin 目录下,由于一般 MPP Sample 比较大,所以默认不会编译进入 rootfs

MPP 相关快捷命令
为方便客户快速跳转到源码位置,SDK编写了若干shell文件提供了快捷跳转函数,在工程目录下也编写了shell文件提供MPP源码的跳转函数:
| 命令 | 跳转位置 |
|---|---|
| cmpp_p | openwrt/package/allwinner/eyesee-mpp/middleware |
| cmpp_s | platform/allwinner/eyesee-mpp/middleware/sun300iw1 |
| cisp | platform/allwinner/eyesee-mpp/middleware/sun300iw1/media/LIBRARY/libisp |
| clibcedarc_p | openwrt/package/allwinner/multimedia/tina_multimedia/libcedarc_mpp |
| clibcedarc_s | platform/allwinner/multimedia/libcedarc_mpp/sun300iw1 |
| cfw_p | openwrt/package/allwinner/eyesee-mpp/framework |
| cfw_s | platform/allwinner/eyesee-mpp/framework/sun300iw1 |
| crtsp_p | openwrt/package/allwinner/eyesee-mpp/private/rtsp |
| crtsp_s | platform/allwinner/eyesee-mpp/system/private/rtsp |
| cpdet_p | openwrt/package/allwinner/vision/person_detection |
| cpdet_s | openwrt/package/allwinner/vision/person_detection |
| cmpplibs | out/v821/ipc/openwrt/staging_dir/target/usr/lib/eyesee-mpp |
| cmppheaders | out/v821/ipc/openwrt/staging_dir/target/usr/include/eyesee-mpp |
| clibcedarcheaders | out/v821/ipc/openwrt/staging_dir/target/usr/include/libcedarc |
| mkmpp | 编译libcedarc, mpp-middleware |
| cleanmpp | 清理mpp-middleware和libcedarc |
| mkall | 编译整个工程 |
| cleanall | 清理整个工程 |
MPP 库整合使用
如果客户想把mpp的头文件和库导入到自己的SDK中去使用,方法如下:
-
编译
Tina-v821 sdk,编译指令参考tina-sdk的说明文档。编译完之后,无需反复编译了。 -
执行
mkmpp,编译mpp平台代码。编译完后,在out目录下就生成了mpp的头文件和库,libcedarc的头文件和库。 -
执行
cmppheaders跳转到mpp头文件目录,执行cmpplibs跳转到mpp库目录,执行clibcedarcheaders跳转到libcedarc头文件目录,把头 文件目录和库目录复制到自己的SDK里面就可以了。
mpp头文件目录为:out/v821/ipc/openwrt/staging_dir/target/usr/include/eyesee-mpp
mpp库目录为:out/v821/ipc/openwrt/staging_dir/target/usr/lib/eyesee-mpp
libcedarc头文件目录为:out/v821/ipc/openwrt/staging_dir/target/usr/include/libcedarc
libcedarc库目录为:out/v821/ipc/openwrt/staging_dir/target/usr/lib
libcedarc是全志的视频编解码库。libcedarc库没有单独建目录,而是放在通用目录下,所以拷贝时最好指定库的名称,v821一般编译出 的视频编解码库有以下这些:
libawmjpegplus.a
libvdecoder.a
libvideoengine.a
libvencoder.a
libvenc_jpeg.a
libvenc_h264.a
libvenc_common.a
libvenc_base.a
libMemAdapter.a
libVE.a
libcdc_base.a
软件框架
MPP平台的设计思想是根据功能划分组件。每个组件负责一个单一功能。通过把各种组件组合起来完成复杂功能。
组件内部核心代码设计借鉴了OpenMaxIL协议规范,在此协议基础上进一步精简接口。OpenMaxIL协议的tunnel和non-tunnel模式,对应组 件对外的绑定和非绑定模式。组件间的绑定,实质是组件内部核心模块之间建立了隧道链接互传数据。为和OpenMaxIL协议代码区分,该 协议定义的OMX前缀的宏定义、函数声明在MPP平台内的头文件中均改为COMP前缀。
OpenMaxIL协议网站是: https://www.khronos.org/openmaxil
组件的代码实现分为两层:
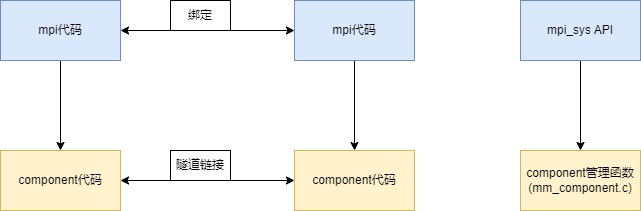
外层提供mpi风格的API,实现通道的概念,建立通道的链表对组件实例进行管理。通过调用内层组件的接口来实现API功能。
内层为Component核心代码。Component的模板代码为"mm_component.h",Component注册、创建、操作机制的代码放在mm_component.c 中。Component调用更底层的库(如视频编解码库、音频编解码库,libisp库,音频3A算法库,音频变速库,文件解封装库,文件封装 库,alsa-lib,v4l2驱动)实现具体功能。
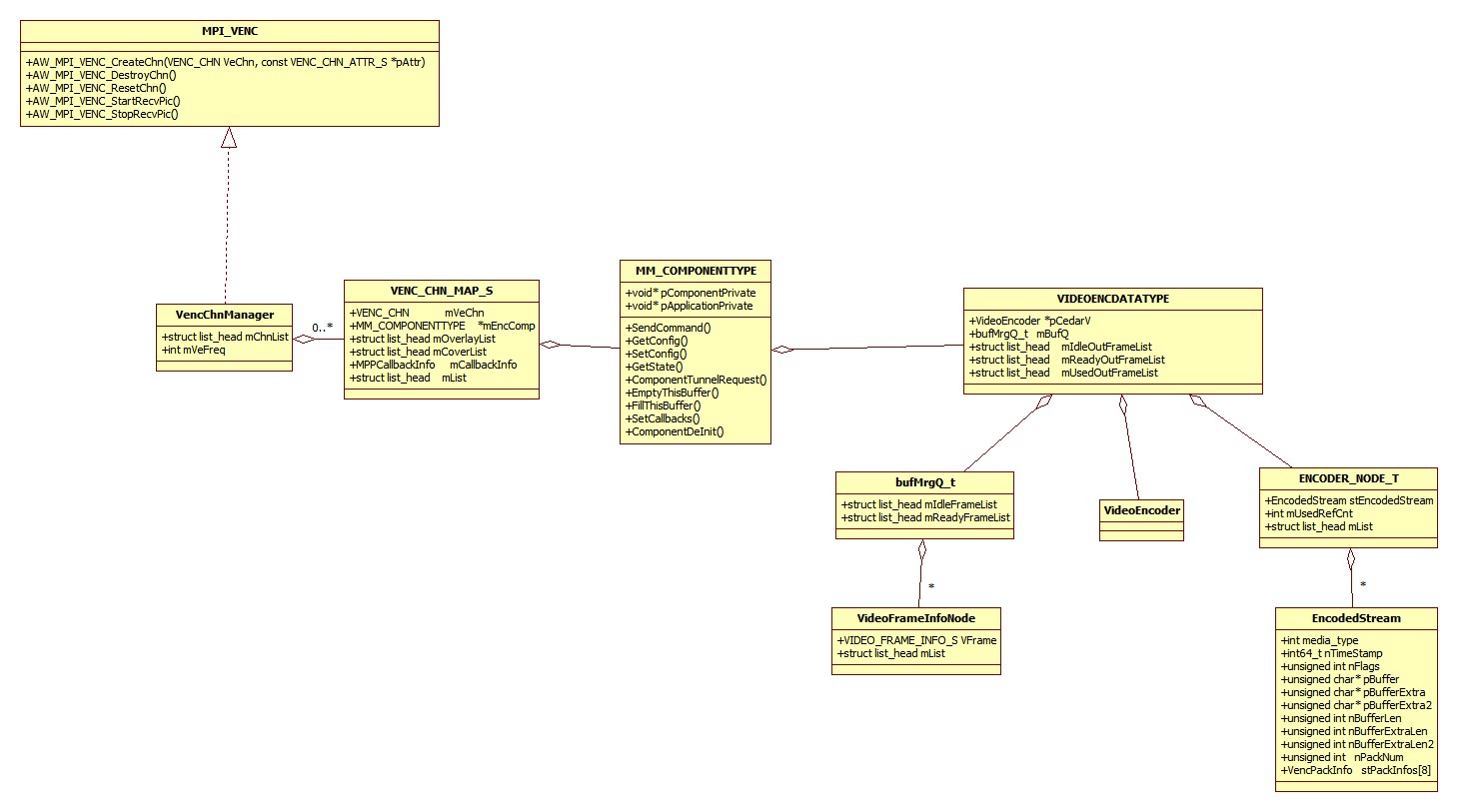
以mpi_venc组件为例:
- 外层API: mpi_venc.h,mpi_venc.c
MPP_API:
AW_MPI_VENC_CreateChn()
AW_MPI_VENC_DestroyChn()
AW_MPI_VENC_StartRecvPic()
AW_MPI_VENC_StopRecvPic()
AW_MPI_VENC_GetStream()
AW_MPI_VENC_ReleaseStream()
AW_MPI_VENC_RegisterCallback()
AW_MPI_VENC_SendFrame()
- 内层Component: VideoEnc_Component.c
Component API:
typedef struct MM_COMPONENTTYPE
{
void* pComponentPrivate;
void* pApplicationPrivate;
ERRORTYPE (*SendCommand)();
ERRORTYPE (*GetConfig)();
ERRORTYPE (*SetConfig)();
ERRORTYPE (*GetState)();
ERRORTYPE (*ComponentTunnelRequest)();
ERRORTYPE (*EmptyThisBuffer)();
ERRORTYPE (*FillThisBuffer)();
ERRORTYPE (*SetCallbacks)();
ERRORTYPE (*ComponentDeInit)();
} MM_COMPONENTTYPE;
- 视频编码库: vencoder.h
VideoEncoder *VencCreate(VENC_CODEC_TYPE eCodecType);
void VencDestroy(VideoEncoder *pEncoder);
int VencInit(VideoEncoder *pEncoder, VencBaseConfig *pConfig);
int VencStart(VideoEncoder *pEncoder);
int VencPause(VideoEncoder *pEncoder);
int VencReset(VideoEncoder *pEncoder);
int VencFlush(VideoEncoder *pEncoder, VencFlushType eFlushType);
int VencGetParameter(VideoEncoder *pEncoder, VENC_INDEXTYPE indexType, void *paramData);
int VencSetParameter(VideoEncoder *pEncoder, VENC_INDEXTYPE indexType, void *paramData);
int VencDequeueOutputBuf(VideoEncoder *pEncoder, VencOutputBuffer *pBuffer);
int VencQueueOutputBuf(VideoEncoder *pEncoder, VencOutputBuffer *pBuffer);
int VencQueueInputBuf(VideoEncoder *pEncoder, VencInputBuffer *inputbuffer);
int VencSetCallbacks(VideoEncoder *pEncoder, VencCbType *pCallbacks, void *pAppData);
mpi_venc组件的代码类图如下:
组件的状态统一设计为下图:
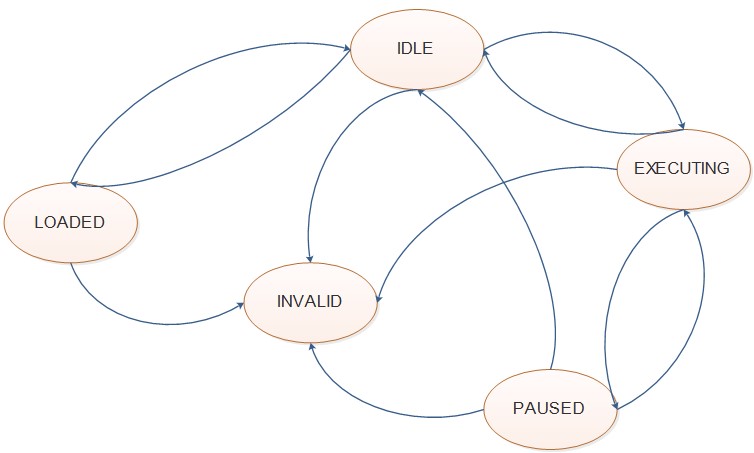
在创建通道过程中,Component刚创建时处于LOADED状态,配置完Component后,转换为IDLE状态。所以app一般在创建完通道后,组件状 态就已经是IDLE状态。随后app可以调用mpi接口,将组件转换为EXECUTING、PAUSE、IDLE状态,最后销毁组件。
MPP 常用调试节点
mpp可以为若干硬件驱动生成proc节点,挂载在debugfs文件系统下,供使用者在系统运行过程中实时查看驱动的运行信息。
配置内核 make kernel_menuconfig,打开配置 CONFIG_SUNXI_MPP 即可生成proc节点。
系统启动后,在终端执行命令:mount -t debugfs none /sys/kernel/debug,挂载debugfs文件系统(默认自动挂载)。然后通过cat指令查看mpp节点信息:
cat /sys/kernel/debug/mpp/vi
cat /sys/kernel/debug/mpp/ve*
cat /sys/kernel/debug/mpp/vo
静态属性:指只能在系统未初始化、未启用设备或通道时,才能设置的属性。 动态属性:指在任何时刻都可以设置的属性。
VI 节点
cat /sys/kernel/debug/mpp/vi
输出示例:
*****************************************************
VIN hardware feature list:
mcsi 2, ncsi 1, parser 2, isp 1, vipp 2, dma 2
CSI_VERSION: CSI300_600, ISP_VERSION: ISP603_100
CSI_CLK: 200000000, ISP_CLK: 0
*****************************************************
vi0:
gc1084_mipi => mipi0 => csi0 => isp0 => vipp0
input => hoff: 0, voff: 0, w: 1280, h: 720, fmt: GRBG10
output => width: 1280, height: 720, fmt: LBC_1X
interface: MIPI, isp_mode: NORMAL, hflip: 0, vflip: 0
prs_in => x: 1280, y: 720, hb: 2432, hs: 6451
bkuf => cnt: 4 size: 1429504 rest: 4, work_mode: online
frame => cnt: 306, lost_cnt: 7, error_cnt: 0
internal => avg: 34(ms), max: 34(ms), min: 33(ms)
CSI Bandwidth: 0
*****************************************************
vi4:
(efault) => mipi0 => csi0 => isp0 => vipp4
input => hoff: 0, voff: 0, w: 0, h: 0, fmt: NULL
output => width: 0, height: 0, fmt: NULL
interface: NULL, isp_mode: NORMAL, hflip: 0, vflip: 0
prs_in => x: 0, y: 0, hb: 0, hs: 0
bkuf => cnt: 0 size: 0 rest: 0, work_mode: online
frame => cnt: 0, lost_cnt: 0, error_cnt: 0
internal => avg: 0(ms), max: 0(ms), min: 0(ms)
CSI Bandwidth: 0
*****************************************************
参数说明:
| 参数 | 描述 |
|---|---|
| mcsi | MIPI通道号,0/1 |
| ncsi | DVP通道号,0 |
| parser | 图像数据解析通道号,0/1/2/3 |
| isp | ISP通道号,0/1 |
| vipp | VI通道号,0~12 |
| input => hoff | 输入图像水平偏移 |
| input => voff | 输入图像垂直偏移 |
| input => w | 输入图像宽度 |
| input => h | 输入图像高度 |
| input => fmt | 输入图像格式,RAW:RGGB/BGGR/GRBG/GBRG,YUV: |
| output => width | 输出图像宽度 |
| output => height | 输出图像高度 |
| output => fmt | 输出图像格式:RAW8/10/12,YUV420等,LBC_1/1.5/2/2.5X |
| interface | 接口类型:PARALLEL/MIPI/BT656/SUBLVDS/HISPI |
| isp_mode | ISP模式:NORMAL/DOL_WDR/CMD_WDR/SEHDR |
| hflip | 输出图像水平(镜像)翻转:0/1 |
| vflip | 输出图像垂直翻转:0/1 |
| prs_in => x | parser输入数据宽度 |
| prs_in => y | parser输入数据高度 |
| prs_in => hb | 行消隐时间 |
| prs_in => hs | 行同步时间 |
| bkbuf => cnt | 图像buffer个数 |
| bkbuf => size | 图像buffer大小 |
| bkbuf => rest | 空闲图像buffer个数 |
| bkbuf => work_mode | 图像编码模式:offline/online |
| tdmbuf => cnt | TDM buffer个数 |
| tdmbuf => size | TDM buffer大小 |
| tdmbuf => cmp_ratio | TDM LBC 压缩系数 |
| ispbuf => cnt | ISP 3DNR buffer个数 |
| ispbuf => size | ISP 3DNR buffer大小 |
| ispbuf => cmp_ratio | ISP 3DNR 压缩系数 |
| frame => cnt | 图像帧计数 |
| frame => lost_cnt | 图像丢帧计数 |
| frame => error_cnt | 图像异常帧计数 |
| internal => avg | 图像帧间隔平均值(ms) |
| internal => max | 图像帧间隔最大值(ms) |
| internal => min | 图像帧间隔最小值(ms) |
VE_BASE 节点
cat /sys/kernel/debug/mpp/ve_base
输出示例:
**********Ch[0] H264 F240 BaseInfo Start**********
Version: 4a182bd42c931bea2f77b0ff9a531d233df8541e
Link: Isp2Ve:1 Ve2Isp:0, Sharp:1
Online: Mode:1, Chan:0, BufNum:1, Overwrite:0
Input: LBC1.0X BT709Full 1280(1280)x720->1280x720, Rot:0
BaseSpec: 1048576bps, 30fps, 100Key
RateCtrl: StaticIPC, VBR(new,BalanceQuality), NormalP, IpcCase, Colour
Qp: Limit:1, Init:37, I[25,45,45], P[25,45,45]
BitRate(Kbps): Avg:863, Act:136
FrameRate(fps): Avg:29, Act:30
VBV(Byte): Total:1445888, Unused:1445568, Valid:320, FrmNum:1, Th:921600
Ref(Byte): LBC1.5X, Reduce:1, Lbc:61440+1314816, Qsub:6144+118784
CurrPic: PQp:27, Bits:23631->2304
Drop: User:0, Lib:0
HwTime(us): Enc{Cur:4914, Avg:4945, Max:0}, Empty{Cur:29115, Avg:29098, Max:29404}
SwTime(us): Num:241, Enc{Cur:1730, Avg:2684, Max:6105}, Empty{Cur:32304, Avg:31212, Max:44385}, Mb:1069, Bin:0, Sei:0,Pskip:0
**********Ch[0] H264 F240 BaseInfo End**********
参数说明:
- JpegBase
| 行分类 | 参数 | 取值范围 | 解释 |
|---|---|---|---|
| 标签 | Ch | [0:15] | Encoder通道号 |
| 标签 | F | [0:+∞) | 软件计算帧序号 + 硬件编码帧序号 |
| Version | 编码库提交版本号 | ||
| 像素格式 | InputFormat | VENC_PIXEL_FMT | VI输出格式 / ENCPP输入格式 |
| 像素格式 | OutputFormat | VENC_OUTPUT_FMT | ENCPP输出格式 / Encoder输入格式 |
| 像素格式 | ColourSpace | VENC_COLOR_SPACE | 颜色空间 |
| Link | Isp2Ve | [0:1] | ISP输出参数给VE使能 |
| Link | Ve2Isp | [0:1] | VE输出参数给ISP使能 |
| Link | Sharp | [0:1] | ENCPP锐化使能 |
| 码控 | Mode | [0:1] | JPEG工作模式,0为单帧拍照,1为MJPEG码流 |
| 码控 | RcMode | [0:1] | MJPEG码控模式,0为CBR,1为固定画质 |
| 码控 | Quality | [10:100] | 当前帧质量系数,值越大画质越好 |
| Rotation | {0,90,180,270} | ENCPP旋转角度 | |
| BitRate(bps) | [0:+∞) | MJPEG目标平均码率 | |
| BitRange(bps) | Rate | [0:+∞) | MJPEG码率上下限范围 |
| BitRange(bps) | Ratio | [0:100] | MJPEG实际偏离目标码率百分比阈值,超出这个值码控开始工作 |
| BitRange(bps) | Th | [0:100] | MJPEG码控阈值,大于这个阈值使用小步长微调,小于这个阈值使用大步长快调 |
| BitRange(bps) | Step | [0:100] | MJPEG码控调节步长 |
| BitRange(bps) | Delay | [0:+∞) | MJPEG码控调节滞后性,值越小调节越快 |
| BitRange(bps) | Quality | [0:100] | MJPEG码控质量系数取值范围 |
| PicSize | Crop使能 | [192:4096] | 输入宽度(输入跨度)x输入高度 -> (裁剪起始坐标)裁剪宽高 -> 输出宽高 |
| PicSize | Crop不使能 | [192:4096] | 输入宽度(输入跨度)x输入高度 -> 输出宽高 |
| ThumbSize | [192:4096] | 缩略图宽高 | |
| wb | en | [0:1] | 回写使能 |
| wb | num | [1:+∞) | 回写buffer数量 |
| wb | size | [192:4096] | 回写buffer宽高 |
| VBV(Byte) | Main | [0:+∞) | 主图码流输出buffer大小 |
| VBV(Byte) | Th | [8192:+∞) | 主图输出buffer剩余空间阈值,小于这个阈值则不启动编码返回异常 |
| VBV(Byte) | Thumb | [8192:+∞) | 缩略图输出buffer大小 |
| HwTime(us) | Enc{Cur} | [0:+∞) | 硬件编码当前帧耗时 |
| HwTime(us) | Enc{Avg} | [0:+∞) | 硬件编码历史平均耗时 |
| HwTime(us) | Enc{Max} | [0:+∞) | 硬件编码历史最大耗时 |
| HwTime(us) | Empty{Curr} | [0:+∞) | 硬件编码当前帧间隔 |
| HwTime(us) | Empty{Avg} | [0:+∞) | 硬件编码历史平均间隔 |
| HwTime(us) | Empty{Max} | [0:+∞) | 硬件编码历史最大间隔 |
| SwTime(us) | Enc{Cur} | [0:+∞) | 软件计算当前帧耗时 |
| SwTime(us) | Enc{Avg} | [0:+∞) | 软件计算历史平均耗时 |
| SwTime(us) | Enc{Max} | [0:+∞) | 软件计算历史最大耗时 |
| SwTime(us) | Empty{Curr} | [0:+∞) | 软件计算当前帧间隔 |
| SwTime(us) | Empty{Avg} | [0:+∞) | 软件计算历史平均间隔 |
| SwTime(us) | Empty{Max} | [0:+∞) | 软件计算历史最大间隔 |
| MemCost(byte) | CPU | [0:+∞) | CPU内存消耗量 |
| MemCost(byte) | ION | [0:+∞) | ION内存消耗量 |
| Texture | [0:1] | 纹理分析使能 | |
| Texture | [0:1] | 纹理分析选择模式 | |
| Texture | [0:100] | 纹理分析比例阈值 | |
| Texture | [0:255] | 纹理分析MAD等级判断阈值 | |
| Texture | [0:4095] | 纹理分析曲线最大值 | |
| Texture | [0:+∞) | 纹理分析当前帧耗时 | |
| Texture | step | [1:4] | 纹理分析块级统计水平垂直方向步长,值越大精准度越低,耗时越短 |
| Tcurve | [0:4095] | 纹理分析曲线,供ISP调整区域滤波强度 |
- H264Base
| 行分类 | 参数 | 取值范围 | 解释 |
|---|---|---|---|
| 标签 | Ch | [0:15] | Encoder通道号 |
| 标签 | F | [0:+∞) | 软件计算帧序号 + 硬件编码帧序号 |
| Version | 编码库提交版本号 | ||
| Link | Isp2Ve | [0:1] | ISP输出参数给VE使能 |
| Link | Ve2Isp | [0:1] | VE输出参数给ISP使能 |
| Link | Sharp | [0:1] | ENCPP锐化使能 |
| Online | Mode | [0:1] | 在线模式 |
| Online | Chan | [0:1] | 在线使能 |
| Online | BufNum | [1:2] | 在线编码输入buffer数量 |
| Online | Overwrite | [0:+∞) | CSI overwrite帧数 |
| Input | VENC_PIXEL_FMT | VIPP输出格式 / ENCPP输入格式 | |
| Input | VENC_COLOR_SPACE | 颜色空间 | |
| Input | [192:4096] | 输入宽度(输入跨度)x 输入高度 -> (裁剪起始水平垂直坐标)裁剪宽高 -> 输出宽高 | |
| BaseSpec | [0:+∞) | 目标平均码率 | |
| BaseSpec | [0:+∞) | 目标帧率 | |
| BaseSpec | Key | [1:256] | I帧周期 |
| BaseSpec | PInsert | [0:+∞) | 当前I帧周期内插入PSkip帧数量 |
| RateCtrl | eVencProductMode | 产品类型 | |
| RateCtrl | VENC_RC_MODE | 码控模式 | |
| RateCtrl | VENC_VIDEO_GOP_MODE | 参考帧参考关系模式 | |
| RateCtrl | [0:1] | IPC场景使能 | |
| RateCtrl | 彩色 / 黑白 | ||
| Qp | Limit | [0:1] | MB级Qp限制使能 |
| Qp | Init | [0:51] | 初始Qp |
| Qp | I | [0:51] | I帧Qp范围 |
| Qp | P | [0:51] | P帧Qp范围 |
| Roi | [0:+∞) | 区域左上角水平垂直坐标 | |
| Roi | [0:+∞) | 区域右下角水平垂直坐标 | |
| Roi | [0:1] | 区域使用绝对Qp使能 | |
| Roi | [0:51] | 区域Qp | |
| BitRate(Kbps) | Avg | [0:+∞) | 总体平均码率,按当前帧与首帧的Pts之差算 |
| BitRate(Kbps) | Act | [0:+∞) | 瞬时平均码率,按当前Ve节点周期内算 |
| FrameRate(fps) | Avg | [0:+∞) | 总体平均帧率,按当前帧与首帧的Pts之差算 |
| FrameRate(fps) | Act | [0:+∞) | 瞬时平均帧率,按当前Ve节点周期内算 |
| VBV(Byte) | Total | [8192:+∞) | Encoder码流输出buffer总大小 |
| VBV(Byte) | Unused | [0:+∞) | Encoder码流输出buffer剩余空间大小 |
| VBV(Byte) | Valid | [0:+∞) | Encoder码流输出buffer已占用空间大小 |
| VBV(Byte) | FrmNum | [0:+∞) | Encoder码流输出buffer已占用未被取走的帧数量 |
| VBV(Byte) | Th | [8192:+∞) | Encoder码流输出buffer剩余空间阈值,小于这个阈值则不启动编码返回异常 |
| Ref(Byte) | LBC | eVeLbcMode | 参考帧buffer数据压缩倍率 |
| Ref(Byte) | Reduce | [0:1] | 参考帧与重建帧共用buffer使能 |
| Ref(Byte) | Total | [0:+∞) | 参考帧buffer总大小 |
| Ref(Byte) | Lbc | [0:+∞) | 参考帧压缩索引信息+压缩数据大小 |
| Ref(Byte) | Qsub | [0:+∞) | 参考帧下采样索引信息+压缩数据大小 |
| HwTime(us) | Enc{Cur} | [0:+∞) | 硬件编码当前帧耗时 |
| HwTime(us) | Enc{Avg} | [0:+∞) | 硬件编码历史平均耗时 |
| HwTime(us) | Enc{Max} | [0:+∞) | 硬件编码历史最大耗时 |
| HwTime(us) | Empty{Curr} | [0:+∞) | 硬件编码当前帧间隔 |
| HwTime(us) | Empty{Avg} | [0:+∞) | 硬件编码历史平均间隔 |
| HwTime(us) | Empty{Max} | [0:+∞) | 硬件编码历史最大间隔 |
| SwTime(us) | Enc{Cur} | [0:+∞) | 软件计算当前帧耗时 |
| SwTime(us) | Enc{Avg} | [0:+∞) | 软件计算历史平均耗时 |
| SwTime(us) | Enc{Max} | [0:+∞) | 软件计算历史最大耗时 |
| SwTime(us) | Empty{Curr} | [0:+∞) | 软件计算当前帧间隔 |
| SwTime(us) | Empty{Avg} | [0:+∞) | 软件计算历史平均间隔 |
| SwTime(us) | Empty{Max} | [0:+∞) | 软件计算历史最大间隔 |
| SwTime(us) | Mb | [0:+∞) | 软件计算当前帧Mb统计信息耗时 |
| SwTime(us) | Bin | [0:+∞) | 软件计算当前帧移动侦测耗时 |
| SwTime(us) | Sei | [0:+∞) | 软件计算当前帧处理Sei耗时 |
| SwTime(us) | Pskip | [0:+∞) | 软件计算当前帧处理PSkip帧耗时 |
| MbTime(us) | Max | [0:+∞) | 软件计算Mb统计信息历史最大耗时 |
| MbTime(us) | Avg | [0:+∞) | 软件计算Mb统计信息历史平均耗时 |
| MbTime(us) | Large | [0:+∞) | 软件计算Mb统计信息历史超过10ms的数量 |
| BinTime(us) | Max | [0:+∞) | 软件计算移动侦测历史最大耗时 |
| BinTime(us) | Avg | [0:+∞) | 软件计算移动侦测历史平均耗时 |
| BinTime(us) | Large | [0:+∞) | 软件计算移动侦测历史超过20ms的数量 |
| MemCost(byte) | CPU | [0:+∞) | CPU内存消耗量 |
| MemCost(byte) | ION | [0:+∞) | ION内存消耗量 |
- H264 Advance
| 行分类 | 参数 | 取值范围 | 解释 |
|---|---|---|---|
| 标签 | Ch | [0:15] | Encoder通道号 |
| 标签 | F | [0:+∞) | 软件计算帧序号 + 硬件编码帧序号 |
| I4x4 | [0:1] | Intra4x4预测使能 | |
| IinP | [0:1] | 在P帧使用Intra预测使能 | |
| SuperFrame | Mode | VENC_SUPERFRAME_MODE | 超大帧处理模式 |
| SuperFrame | MaxBytes | [0:+∞) | 超大I/P帧判断阈值(byte) |
| SuperFrame | P2IRatio | [0:100] | P帧相对于I的大小比例上限,若为0,则表示不设定该功能 |
| SuperFrame | Times{Max} | [0:+∞) | 超大帧在重编模式下,允许最大重编次数 |
| SuperFrame | Times{Total} | [0:+∞) | 超大帧出现累计次数 |
| 2DNR | YStr | [0:15] | 2D滤波亮度强度系数,值越大亮度越糊 |
| 2DNR | YTh | [0:254] | 2D滤波亮度差值阈值,若相邻像素亮度值差值大于这个阈值,则跳过这个相邻像素 |
| 2DNR | CStr | [0:15] | 2D滤波色度强度系数,值越大亮度越糊 |
| 2DNR | CTh | [0:254] | 2D滤波色度差值阈值,若相邻像素色度值差值大于这个阈值,则跳过这个相邻像素 |
| 3DNR | y | [0:1] | 亮度3D滤波使能 |
| 3DNR | c | [0:1] | 色度3D滤波使能 |
| 3DNR | I | [0:1] | I帧3D滤波使能 |
| 3DNR | MvStatusEn | [0:1] | 3D滤波使用运动状态判断使能 |
| 3DNR | PixDiffEn | [0:1] | 3D滤波使用像素差值判断使能 |
| 3DNR | CoefAutoMode | [0:1] | 3D滤波自适应计算强度系数使能 |
| 3DNR | CoefClip | [0:16] | 3D滤波强度系数上下限 |
| 3DNRParam | StatusTh | [0:3] | 3D滤波MvStatusEn为1时生效,运动状态判断阈值 |
| 3DNRParam | MvTh | [0:255] | 3D滤波用于判断运动状态的MV阈值 |
| AvgTh-RefCoef | [0:255] | 3D滤波CoefAutoMode为1时生效,对应等级的阈值与强度 | |
| RegionHis | r | [0:1] | 区域MV等级写出使能 |
| RegionHis | w | [0:1] | 区域MV等级读入使能 |
| RegionHis | Size{w} | [1:256] | 区域MV统计单个区域的宽度,以16个像素为单位 |
| RegionHis | Size{h} | [1:+∞) | 区域MV统计单个区域的高度,以16个像素为单位 |
| RegionHis | AutoMode | [0:1] | 区域MV统计自动模式使能 |
| RegionD3D | lr | [0:1] | 区域3D滤波水平方向扩展使能 |
| RegionD3D | ud | [0:1] | 区域3D滤波垂直方向扩展使能 |
| RegionD3D | hor | [0:3] | 区域3D滤波区域最小水平MV最大数量 |
| RegionD3D | ver | [0:3) | 区域3D滤波区域最小垂直MV最大数量 |
| RegionD3D | [1:16] | 区域3D滤波水平区域个数 | |
| RegionD3D | [1:+∞) | 区域3D滤波垂直区域个数 | |
| RegionD3D | [0:256] | 区域3D滤波运动强度判断阈值 | |
| MV | TuSplt | [0:1] | TuSplit使能 |
| MV | AMP | [0:1] | AMP使能 |
| MV | LambdaOffset | [-8:7] | Lambda偏移量 |
| MV | DenoiseVal | [0:127] | MV滤波预测值 |
| MV | PMV | [0:1] | PMV使能 |
| CPMV[] | [0:127] | CPMV场景1判断使能,若大于0,表示阈值 | |
| CPMV[] | [0:127] | CPMV场景2判断使能,若大于0,表示阈值 | |
| CPMV[] | [0:127] | CPMV场景3判断使能,若大于0,表示阈值 | |
| CPMV[] | [0:1] | CPMV场景4判断使能 | |
| CPMV[] | [0:1] | CPMV场景5判断使能 | |
| SelectMode | {double,fast} | CPMV选择模式 | |
| SelectMode | {fast,best} | SME左边MV更新模式 | |
| IPBitsRatio | Scene | [0:+∞) | VBR码控IP帧bit数预分配按纹理复杂度分级的比例,值越大I帧获得的bit数越多 |
| IPBitsRatio | Move | [0:+∞) | VBR码控IP帧bit数预分配按运动复杂度分级的比例,值越大I帧获得的bit数越多 |
| BitsClipCoef | Mode | [0:1] | VBR码控剩余bit数利用限制模式 |
| BitsClipCoef | GopClip | [0:1] | VBR码控剩余bit数利用限制精确到GOP级使能及比例 |
| BitsClipCoef | CoefTh | [0:+∞) | VBR码控剩余bit数利用限制在不同运动状态下的缩放系数 |
| VbrPara | MaxBitRate | [0:+∞) | VBR码控IP帧bit数预分配比例,在运动状态下的额外系数,值越大,运动状态允许的实际码率越高 |
| VbrPara | Quality | [1:20] | VBR码控IP帧bit数预分配比例,在静止状态下的P帧额外系数,值越大,静止状态P帧获得的bit数越多 |
| VbrPara | BitsCoef{I} | [1:20] | VBR码控IP帧bit数预分配比例,I帧的额外系数,值越大,I帧获得的bit数越多 |
| VbrPara | BitsCoef{P} | [1:50] | VBR码控IP帧bit数预分配比例,在运动状态下的P帧额外系数,值越大,运动状态P帧获得的bit数越多 |
| MbRc | [0:1] | 行级码控使能 | |
| MbRc | MoveStatus{min} | MoveStatus | 当帧级运动复杂度低于该值时,I帧关闭行级码控,I帧画质更好 |
| MbRc | MoveStatus{Scene} | SceneStatus | 当前帧级纹理复杂度 |
| MbRc | MoveStatus{Move} | MoveStatus | 当前帧级运动复杂度 |
| MbRc | MoveLevel | AW_MOVINT_LEVEL | 当前帧级运动等级 |
| Mad[0][] | [0:100] | 当前帧级纹理MAD小于10的直方图 | |
| ClassifyTh[] | [0:100] | 当前块级码控根据MAD值分级阈值 | |
| EnvLv | (-∞:+∞) | ISP反馈过来的帧级光照强度 | |
| CameraMove | eCameraStatus | 当前镜头移动状态判断模式 | |
| CameraMove | LensMove | [0:1] | 当前镜头移动状态 |
| CameraMove | MoveNum | [0:+∞) | 当前镜头移动的持续帧数 |
| CameraMove | MoveMaxQp | [0:51] | 镜头移动场景下允许的最大Qp |
| IspD2DLevel | 0:4095] | 当前Ve2Isp的实际2D滤波强度,值越大,ISP的2D滤波强度越强,画面越糊 | |
| IspD2DLevel | Limit | [0:1] | Ve2Isp的2D滤波强度按运动复杂度分级开关 |
| IspD2DLevel | [0:4095] | Ve2Isp的2D滤波强度按运动复杂度各个分级的值 | |
| IspD2DLevel | OverflowScale | [0:+∞) | 当前帧实际bit数超过目标bit数比例 |
| RegionLinkEn | [0:1] | Ve2Isp区域分析总使能 | |
| RegionLinkEn | [0:1] | Ve2Isp区域纹理分析使能 | |
| RegionLinkEn | [0:1] | Ve2Isp区域运动分析使能 | |
| RegionLinkEn | InterVal | [0:10] | Ve2Isp区域分析帧间隔,值越大,精准度越低,耗时越小 |
| RegionLinkEn | AdaptEn | [0:1] | Ve2Isp区域分析自适应使能 |
| RegionLinkEn | Step | [1:16] | Ve2Isp区域分析水平垂直方向步长,值越大,精准度越低,耗时越小 |
| RegionLinkEn | DenoiseEn | [0:1] | Ve2Isp区域分析修改块级Qp开关 |
| RegionLinkEn | Tex | {Default,Define} | Ve2Isp区域纹理分析模式 |
| RegionLinkEn | [0:100] | Ve2Isp区域纹理分析,平坦块所占比例,小于该阈值,该区域纹理曲线阈值为0 | |
| RegionLinkEn | [0:255] | Ve2Isp区域纹理分析,平坦块所占比例,小于该阈值,该区域纹理曲线阈值自适应分配,否则为最大值 | |
| RegionLinkEn | [0:255] | Ve2Isp区域纹理分析,MAD小于该阈值,判断为平坦块 | |
| RegionLinkEn | [0:255] | Ve2Isp区域纹理分析,MAD小于该阈值,判断为正常块,否则判断为复杂块 | |
| RegionLinkEn | [0:4095] | Ve2Isp区域纹理分析,纹理曲线最大值 | |
| Motion | [0:1] | Ve2Isp区域运动分析使能 | |
| Motion | {Default,Define} | Ve2Isp区域运动分析选择模式 | |
| Motion | [0,1] | Ve2Isp区域运动分析水平方向扩展使能 | |
| Motion | [0,1] | Ve2Isp区域运动分析垂直方向扩展使能 | |
| Motion | [0,1] | Ve2Isp区域运动分析方向扩展自适应使能 | |
| Motion | l | [0,7] | Ve2Isp区域运动分析左边扩展区域个数 |
| Motion | r | [0,7] | Ve2Isp区域运动分析右边扩展区域个数 |
| Motion | u | [0,7] | Ve2Isp区域运动分析上边扩展区域个数 |
| Motion | d | [0,7] | Ve2Isp区域运动分析下边扩展区域个数 |
| Motion | [0,1] | Ve2Isp区域运动分析使用软件阈值使能 | |
| Motion | [0:100] | Ve2Isp区域运动分析,当前区域运动块比例小于该阈值,该区域运动曲线阈值为0 | |
| Motion | [0:100] | Ve2Isp区域运动分析,当前区域运动块比例小于该阈值,该区域运动曲线阈值为自适应分配,否则为最大值 | |
| Recover | [0:1] | Ve2Isp区域运动分析,I帧的邻近P帧参数覆盖使能 | |
| Recover | [0:1] | Ve2Isp区域运动分析,I帧的邻近P帧参数按比例覆盖使能 | |
| Recover | [0:50] | Ve2Isp区域运动分析,I帧的邻近P帧参数覆盖,运动曲线阈值衰减比例 | |
| Recover | [0:100] | Ve2Isp区域运动分析,I帧的邻近P帧参数覆盖比例 | |
| Recover | num | [0,255] | Ve2Isp区域运动分析,I帧前/后帧参数覆盖的帧数 |
| Recover | mtb | [0,4095] | Ve2Isp区域运动分析,运动曲线最大值 |
| Recover | [0,4095] | Ve2Isp区域运动分析,I帧前,运动曲线最大值 | |
| Recover | [0,4095] | Ve2Isp区域运动分析,I帧后,运动曲线最大值 | |
| WeightEn | [0:1] | Ve2Isp区域分析,I帧的区域滤波曲线阈值添加邻近帧权重使能 | |
| WeightEn | [0,1] | Ve2Isp区域分析,P帧的区域滤波曲线阈值添加邻近帧权重使能 | |
| WeightEn | [0,256] | Ve2Isp区域纹理分析,区域纹理曲线添加邻近帧权重,3种纹理类型的权重值 | |
| WeightEn | [0,256] | Ve2Isp区域分析,添加邻近帧权重时,当前帧的权重值 | |
| Mcurve1 | [0,4095] | Ve2Isp区域运动分析曲线 | |
| Mcurve2 | [0,4095] | Ve2Isp区域纹理分析曲线 | |
| VbrOptEn | [10,100] | 新Vbr策略,IP帧比例 | |
| VbrOptEn | [1,10] | 新Vbr策略,使用I帧周期个数 | |
| VbrOptEn | [0,51] | 新Vbr策略,节省bit数的Qp阈值,平均Qp大于该值,则不再节省bit数 | |
| VbrOptEn | [0,51] | 新Vbr策略,爆发bit数的Qp阈值,平均Qp小于该值,则不再爆发bit数 | |
| VbrOptEn | [1,8] | 新Vbr策略,Bpp等级数量 | |
| VbrOptEn | [0,51] | 新Vbr策略,前后帧Qp差值下限 | |
| VbrOptEn | [0,51] | 新Vbr策略,前后帧Qp差值上限 | |
| VbrOptEn | [0,300] | 新Vbr策略,I帧目标bit数最小缩放比例 | |
| VbrOptEn | [0,300] | 新Vbr策略,P帧目标bit数最小缩放比例 | |
| VbrOptEn | [0,300] | 新Vbr策略,I帧目标bit数最大缩放比例 | |
| VbrOptEn | [0,300] | 新Vbr策略,P帧目标bit数最大缩放比例 | |
| VbrOptEn | [0,300] | 新Vbr策略,I帧目标bit数最小缩放比例阈值 | |
| VbrOptEn | [0,300] | 新Vbr策略,P帧目标bit数最小缩放比例阈值 | |
| VbrOptEn | [0,300] | 新Vbr策略,I帧目标bit数最大缩放比例阈值 | |
| VbrOptEn | [0,300] | 新Vbr策略,P帧目标bit数最大缩放比例阈值 | |
| InstaneousBR | [0,1] | 新Vbr策略,瞬时码率控制使能 | |
| InstaneousBR | [0,1] | 新Vbr策略,瞬时码率控制,修改I帧Qp使能 | |
| InstaneousBR | [0:+∞) | 新Vbr策略,瞬时码率控制,最大瞬时码率 | |
| InstaneousBR | [20,120] | 新Vbr策略,瞬时码率控制,瞬时码率统计周期 | |
| InstaneousBR | ClasMadThEn | [0,1] | 新Vbr策略,瞬时码率控制,修改块级码控纹理MAD判断阈值使能 |
| IMadTh | [0,255] | 新Vbr策略,瞬时码率控制,ClasMadThEn为1时生效,I帧的纹理MAD阈值 | |
| PMadTh | [0,255] | 新Vbr策略,瞬时码率控制,ClasMadThEn为1时生效,P帧的纹理MAD阈值 | |
| ClipQpFunc | [0,1] | 新Vbr策略,关闭行级码控使能 | |
| ClipQpFunc | MoveStatus | 新Vbr策略,运动复杂度阈值 | |
| ClipQpFunc | [0,1] | 新Vbr策略,块级Qp限制使能 | |
| ClipQpFunc | [0,10] | 新Vbr策略,纹理MAD分级Qp阈值放大 | |
| ClipQpFunc | [0,51] | 新Vbr策略,Qp最大值 | |
| ClipQpFunc | [0,51] | 新Vbr策略,初始QP | |
| ClipQpFunc | [0,51] | 新Vbr策略,外部传入I帧Qp下限 | |
| ClipQpFunc | [0,51] | 新Vbr策略,外部传入I帧Qp上限 | |
| ClipQpFunc | [0,51] | 新Vbr策略,外部传入P帧Qp下限 | |
| ClipQpFunc | [0,51] | 新Vbr策略,外部传入P帧Qp上限 | |
| ClipQpFunc | [0,51] | 新Vbr策略,实际使用I帧Qp下限 | |
| ClipQpFunc | [0,51] | 新Vbr策略,实际使用入I帧Qp上限 | |
| ClipQpFunc | [0,51] | 新Vbr策略,实际使用P帧Qp下限 | |
| ClipQpFunc | [0,51] | 新Vbr策略,实际使用P帧Qp上限 | |
| Breath | [0,1] | 新Vbr策略,呼吸效应处理使能 | |
| Breath | [0,1] | 新Vbr策略,呼吸效应处理,Qp更新模式 | |
| Breath | [0,200] | 新Vbr策略,呼吸效应处理,码率倍率 | |
| Breath | [0,5] | 新Vbr策略,呼吸效应处理,I帧相邻帧Qp差值阈值,大于该值启动特殊处理 | |
| Breath | [0,10] | 新Vbr策略,呼吸效应处理,P帧相邻帧Qp差值阈值,大于该值启动特殊处理 | |
| Breath | [0,1] | 新Vbr策略,呼吸效应处理,比较I帧Qp使能 | |
| Breath | [0:+∞) | 新Vbr策略,呼吸效应处理,I帧bit数最大阈值 | |
| MotionSearch | [1:+∞) | 移动侦测处理帧间隔 | |
| MotionSearch | [0,1] | 移动侦测不使用默认参数使能,该值为1时,外部修改参数才会有效 | |
| MotionSearch | [1,256] | 移动侦测水平方向区域个数 | |
| MotionSearch | [1:+∞) | 移动侦测垂直方向区域个数 | |
| MotionSearch | [0,1] | 移动侦测检查帧间MAD使能 | |
| MotionSearch | [0,255] | 移动侦测,帧间MAD大于该阈值,判断为运动块 | |
| MotionSearch | [0,100] | 移动侦测,根据帧间MAD判断为运动块,占当前区域的比例,大于该阈值,该区域判断为运动区 | |
| MotionSearch | [0,1] | 移动侦测,检查帧间MAD时,使用形态学滤波使能,精准度提升,但耗时严重加大 | |
| MotionSearch | [0,1] | 移动侦测,检查帧间MAD时,使用加权背景更新使能,精准度提升,但耗时严重加大 | |
| MotionSearch | [0,1] | 移动侦测,检查MV使能 | |
| MotionSearch | [0,511] | 移动侦测,检查MV时,MV大于该阈值,判断为大MV块 | |
| MotionSearch | [0,100] | 移动侦测,检查MV时,判断为大MV块占当前区域的比例阈值 | |
| MotionSearch | [0,100] | 移动侦测,检查MV时,判断为非零MV块占当前区域的比例阈值 | |
| DirMvInfo | [0,1] | 帧级MV方向判断使能 | |
| DirMvInfo | [0,20] | 帧级MV方向判断帧间隔 |
ISP 节点
cat /sys/kernel/debug/mpp/isp
示例输出:
*****************************************************
VIN hardware feature list:
CSI_VERSION: CSI300_600, ISP_VERSION: ISP603_100
CSI_CLK: 200000000, ISP_CLK: 0
vipp0, isp_dode: NORMAL
*****************************************************
ISP0 debug param list:
===> exp: 12000, gain: 24, lum_idx: 185, coms_temp: 45
===> color_temp: 6577, rgain: 504, bgain: 435
===> contrast: 256, sharp: 256, bright: 256
===> satur: 256, tdnf: 256, bdnf: 256, pltm: 0
*****************************************************
[ISP Colorspace]
====> REC709_FULL
[ISP Cfg Version Name]
====> gc1084_mipi_isp603_20240828_190004_clean_rgb_30fps
[ISP Libs Commit Version]
====> commit: 2ea5bec2fbfd8d5018938eb9ddf0f950986bb43f
*****************************************************
参数说明:
| 类别 | 参数 | 描述 |
|---|---|---|
| VIN硬件功能 | CSI_VERSION | CSI的版本 |
| ISP_VERSION | ISP的版本 | |
| CSI_CLK | CSI的时钟频率,单位:Hz | |
| ISP_CLK | ISP的时钟频率,单位:Hz | |
| vipp | VIPP设备号 | |
| isp_mode | 当前ISP功能模式,NORMAL为线性模式, | |
| DOL_WDR为WDR模式 | ||
| ISP调试参数 | exp | 曝光行 |
| gain | 增益(16为一倍) | |
| lum_idx | AE亮度索引 | |
| coms_temp | sensor 温度(需要 sensor 驱动实现回调) | |
| color_temp | 色温 | |
| rgain | 白平衡R分量增益 | |
| bgain | 白平衡B分量增益 | |
| contrast | ISP特效接口结点--对比度 | |
| sharp | ISP特效接口结点--锐度 | |
| bright | ISP特效接口结点--亮度 | |
| satur | ISP特效接口结点--饱和度 | |
| tdnf | ISP特效接口结点--3D降噪强度 | |
| bdnf | ISP特效接口结点--2D降噪强度 | |
| pltm | ISP特效接口结点--数字宽动态强度 | |
| ISP版本参数 | ISP Colorspace | 颜色空间类型 |
| ISP Cfg Version Name | ISP效果文件版本信息 | |
| ISP Libs Commit Version | ISP库的版本commit信息 |
MIPI 节点
cat /sys/kernel/debug/mpp/mipi
示例输出
*************** MIPI Register Status List **************
------------------ PHY COMMON Register -----------------
phy_link_mode: 0x0 (unrecognized link mode)
-------------- PHY Digital Layer Register --------------
[mipi0]
phy_en: enabled
data_lane_en: 0x1 (lane0 enabled)
clk_lane_en: enabled
deskew: 0x2
settle_time: 0x28
mipi_bps: 396 Mbps
data_lane0: 0x5 (HS_S, ok)
data_lane1: 0x0 (error)
clk_lane: 0x5 (HS_S, ok)
[mipi1]
phy_en: disabled
-------------- PORT Payload Layer Register -------------
[mipi0]
port_en: enabled
lane_num: 1 lane
channel_num: 1 channel
out_data_num: 1 data
wdr_mode: normal
unpack_en: enabled
yuv_seq: YUYV
ch_field: progressive
int_pending: 0xf (ok)
cur_data_type: 0x2b (RAW10)
vir_ch: 0
[mipi1]
port_en: disabled
********************************************************
参数说明:
| 类别 | 参数 | 描述 |
|---|---|---|
| PHY Common | phy_link_mode | 当前mipi所配置的连接模式(2x2-lane 或 1x4-lane) |
| PHY Digital | phy_en | MIPI DPHY使能位 |
data_lane_en | 数据lane使能位 | |
clk_lane_en | 时钟lane使能位 | |
deskew | PHY时钟lane0延迟,软件设定的延时值 | |
settle_time | PHY时钟lane和数据lane从接收到高速RX(LP11-LP01-LP00)请求到开启高速比较器的延时,单位为cmb_clk_cycle | |
mipi_bps | MIPI当前数据传输速率(bps),单位为Mbps | |
data_lane0 | MIPI数据lane0的状态(正常状态:在0x03(LP11S低功耗模式)和0x05(HS_S高速模式)两个状态之间来回翻转) | |
data_lane1 | MIPI数据lane1的状态(正常状态:在0x03(LP11S低功耗模式)和0x05(HS_S高速模式)两个状态之间来回翻转) | |
clk_lane | MIPI时钟lane0的状态(正常状态:在0x03(LP11S低功耗模式)和0x05(HS_S高速模式)两个状态之间来回翻转) | |
| PORT Payload | port_en | PORT通道使能位 |
lane_num | 当前MIPI配置的lane数(取值范围:1~4 lane,其中PORT0最高支持4 lane,PORT1最高支持2 lane) | |
channel_num | 当前MIPI配置的通道个数(取值范围:1~4 channels) | |
out_data_num | 每次输出的数据个数(取值范围:1 data 或 2 data) | |
wdr_mode | 0x0:Normal模式(无WDR/MIPI VC/MIPI DT);0x2:Pixel Data模式,通过每行的第1个Pixel data区分多路WDR图像 | |
unpack_en | MIPI CSI2协议解包使能开关 | |
yuv_seq | MIPI YUV格式传输顺序 | |
ch_field | MIPI输入源类型配置状态(0:progressive,输入源配置为逐行扫描数据;1:interlaced,输入源配置为隔行扫描数据) | |
int_pending | 中断pending寄存器状态(正常状态为:0x0f 或 0x4f 或 0x3f) | |
cur_data_type | MIPI根据收到的包头信息获取到的数据格式类型 | |
vir_ch | MIPI当前的虚拟通道编号 |
mipi_bps 计算公式为:
mipi_bps = 1000 * dphy_clk * 8 / phy_freq_cnt
phy_freq_cnt 为PHY_FREQ_CNT寄存器值(0x0034[31:16]),表示1000个 PHY byte clk cycle 时间内的 cmb_clk_cycle 个数,用于换算 PHY0 或 PHY1 的 byte clk 频率,其中 dphy_clk 为 VIN_TOP_CLK,即CSI频率,单位为M;
MPP 打印开启方法
编码库打印等级调整
- 开始编码前,通过以下命令调整编码库打印等级。
echo 3 > /tmp/libcedarc_dynamic_log_level
其中,3为logd等级。
设置logd等级后,logd、logi、logw、loge都可打印。
等级定义:
loge:6
logw:5
logi:4
logd:3
logv:2
- 也可以修改
/etc/cedarc.conf中的cdc_log_level配置项改变打印等级,打印等级的定义如下:
# #VERBOSE = 2,
# #DEBUG = 3,
# #INFO = 4,
# #WARNING = 5,
# #ERROR = 6,
默认为cdc_log_level = 5。
MPP 平台打印等级调整
先make menuconfig中配置,编译时就生效。MPP打印等级的数值越低表示等级越高。高于等于打印等级的打印编译进固件。低于打印等级的打印不编译。
#define OPTION_LOG_LEVEL_CLOSE 0
#define OPTION_LOG_LEVEL_ERROR 1
#define OPTION_LOG_LEVEL_WARN 2
#define OPTION_LOG_LEVEL_DEBUG 3
#define OPTION_LOG_LEVEL_VERBOSE 4
Allwinner
-> eyesee-mpp
-> select log level for compile (debug) --->
( ) close
( ) error
( ) warn
(X) debug
( ) verbose
再动态配置打印等级。MPP平台默认的打印等级为OPTION_LOG_LEVEL_DEBUG。允许用户在运行时动态改变打印等级,在串口终端输入指令:
echo 3 > /tmp/mpp_log_level
就表示动态设置打印等级为 3(debug等级),mpp 内部的环境变量监控线程会检测并读取 /tmp/mpp_log_level 的值,并设置给内部全局变量MPP_GLOBAL_LOG_LEVEL。当打印语句执行时,打印等级高于 debug 等级的打印语句会调用打印函数输出。MPP_GLOBAL_LOG_LEVEL默认为OPTION_LOG_LEVEL_DEBUG。但打印语句必须被编译进固件才能真正打印出来。所以make menuconfig菜单中的打印等级选项是允许的最低打印等级。
MPP 版本查询方法
编码库版本
- 日志打印
编码库的打印等级降为LOG_LEVEL_DEBUG时,在启动时会打印版本信息。编码库初始化时从/etc/cedarc.conf读取配置,配置中包含cdc_log_level指定打印等级。默认的打印等级为cdc_log_level = 5,就是LOG_LEVEL_WARNING。修改为cdc_log_level = 3后,启动编码库查看编码库版本的打印信息如下:
>>>>>>>>>>>>>>>>>>>>>>>>>>>>> Cedar Codec <<<<<<<<<<<<<<<<<<<<<<<<<<<<
tag :
branch: master
commit: 4a182bd42c931bea2f77b0ff9a531d233df8541e
date : Thu May 25 15:34:03 2017 +0800
author: none
change-id : none
release_author : jenkins8080
patch :
----------------------------------------------------------------------
- VE调试节点
测试过程中,通过查看VE节点的调试信息可以查询编码版本信息。
cat /sys/kernel/debug/mpp/ve_base
**********Ch[0] H265 F239 BaseInfo Start**********
CommitVersion: 6d05da88d956f3b7b9327f240303e7067f8eabf2
ISP 库版本
- 日志打印
测试时,ISP初始化时会打印版本信息。
[ISP]>>>>>>>>>>>>>>>>>>>> ISP VERSION INFO <<<<<<<<<<<<<<<<<<<
IPCORE: ISP603
branch: libisp-dev
commit: 2ea5bec2fbfd8d5018938eb9ddf0f950986bb43f
date : Thu Oct 17 11:18:04 2024 +0800
author: <mayifei@allwinnertech.com>
--------------------------------------------------------
- ISP调试节点
测试过程中,通过查看ISP节点的调试信息可以查询ISP版本信息。
cat /sys/kernel/debug/mpp/isp
====> commit: 14df8348718d093707641fea73eba7db962885f5