Linux Encoder 开发指南
前言
文档简介
本文档重点阐述 Allwinner 平台视频编码的驱动开发方法、使用规范与调试技巧。目的是为了视频编码系统开发与支持等相关技术人员,能对 Allwinner 平台视频编码器的驱动体系有更深入的理解,并通过实际应用指导快速开展高效开发、定位问题与解决问题。文档详细介绍了编码器的接口设计、数据结构、配置方法及最佳实践,为开发者提供全面的技术参考。
目标读者
视频编码系统开发人员、视频编码系统技术支持人员
符号约定
本文档中会使用不同符号区分信息类型,具体释义如下:
用于呈现技术核心信息(如功能原理、核心参数定义)、流程补充内容(如步骤细节说明)等。
用于分享技术操作中的高效方法(如命令行快捷指令、配置项优化窍门)与实践技巧。
用于突出技术操作中易出错的环节(如参数配置边界、操作顺序要求)的提示。
适用平台
| 平台 | 内核版本 |
|---|---|
| V861 | Linux 5.10及以上内核版本 |
相关术语
| 术语 | 解释 |
|---|---|
| CABAC | Context-based Adaptive Binary Arithmetic Coding,基于上下文的自适应二进制算术编码 |
| CAVLC | Context-based Adaptive Variable Length Coding,基于上下文的自适应可变长度编码 |
| Encoder | 视频编码器,将原始视频数据压缩编码为特定格式(如H.264、JPEG等)的硬件或软件模块 |
| H.264 | 一种高效的视频压缩编码标准,也称为MPEG-4 AVC |
| I帧 | Intra-frame,帧内编码帧,可独立编码的完整图像帧 |
| JPEG | 联合图像专家小组制定的静态图像压缩标准 |
| P帧 | Predicted-frame,预测帧,基于前面的I帧或P帧进行预测编码 |
| QP | Quantization Parameter,量化参数,影响编码质量和码率 |
| ROI | Region of Interest,感兴趣区域,可对视频中特定区域进行特殊处理 |
| SVC | Scalable Video Coding,可伸缩视频编码,支持时域、空域等多种可伸缩性 |
| VBV | Video Buffer Verifier,视频缓冲验证器,用于控制码率输出 |
概述
本章节主要介绍Allwinner平台V861芯片的视频编码技术规格及编码特性。
Encoder功能概述
Allwinner平台Encoder模块支持JPEG、H.264、H265格式编码,本节将详细介绍其主要特性,包括支持的编码格式、分辨率范围、编码模式等关键参数,帮助开发者充分了解编码器的能力边界和优化空间。
H.264编码特性
H.264编码是Encoder模块的核心功能之一,具有以下特性:
- Profile支持:支持Baseline Profile、Main Profile、High Profile 5.1
- 编码模式:支持I帧、P帧编码
- 熵编码方式:支持CABAC和CAVLC
- 码率控制:支持CBR(恒定码率)、VBR(可变码率)、AVBR(适配式可变码率控制方式)等多种码率控制方式
- 特殊功能:支持ROI编码、循环帧内刷新、时域SVC等高级特性
- 最大性能:4k@30fps
H.265编码特性
H.264编码是Encoder模块的核心功能之一,具有以下特性:
- Profile支持:支持Main Profile 5.0
- 编码模式:支持I帧、P帧编码
- 熵编码方式:支持CABAC
- 码率控制:支持CBR(恒定码率)、VBR(可变码率)、AVBR(适配式可变码率控制方式)等多种码率控制方式
- 特殊功能:支持ROI编码、循环帧内刷新、时域SVC等高级特性
- 最大性能:4k@35fps
JPEG编码特性
JPEG编码主要用于静态图像压缩,具有以下特性:
- 质量控制:支持0-100级的质量参数调整
- EXIF支持:支持嵌入图像元数据信息
- 编码模式:支持单帧JPEG编码和MJPEG序列编码
- 最大性能:4k@30fps
模块驱动开发
本章节介绍Allwinner平台视频编码的结构设计、核心模块功能及API接口规范,帮助开发者理解编码系统的整体架构和模块间的交互关系。
视频编码的模块架构简介
视频编码库采用模块化架构设计,主要由四个核心模块组成,分别为帧缓冲输入管理模块、视频编码设备、码流输出管理模块、编码控制模块,各模块职责明确,协同工作完成视频编码功能,如下图所示:

| 模块名称 | 英文全称 | 主要职责 |
|---|---|---|
| 帧缓冲输入管理模块 | Frame Buffer Manager | 管理编码输入图像帧,支持外部内存管理和内部内存分配两种模式,提供高效的帧数据存取接口 |
| 视频编码设备 | Video Encoder Device | 负责将输入图像帧编码为压缩码流,提供硬件编码能力接口,支持H.264、H.265、JPEG等编码格式 |
| 码流输出管理模块 | Bitstream Manager | 管理编码输出码流,维护码流缓冲区,记录帧结构信息,支持循环缓冲区管理 |
| 编码控制模块 | vencoder | 协调各模块工作,控制整体编码流程,对外提供统一的编码库接口函数,实现功能封装 |
源码清单
编码器驱动源码主要包含头文件、实现文件和配置文件,整体组织结构清晰。
代码工程结构概述
驱动的主要源码文件及说明如下:
.
├── base/ # Core utility modules: logging, message queue, INI parser, ION memory utils, etc.
│ ├── cdcIniparser/ # Custom INI configuration file parser implementation
│ ├── filesink/ # Output sink modules for bitstream and picture data dumping or MD5 checksum
│ └── include/ # Public headers for base utilities (log, memory list, platform config, etc.)
├── conf/ # System and hardware configuration files (e.g., video engine parameters)
├── demo/ # Example applications demonstrating SDK usage
│ ├── jpegdemo/ # JPEG decoding demo
│ ├── vdecoderDemo/ # Raw video stream decoding demo
│ └── vencoderDemo/ # Video encoding demo (v2 architecture)
├── include/ # Global public headers for video codec APIs (decoder/encoder interfaces, types, adapters)
├── install/ # Staging directory for final system installation (e.g., /etc, /usr/lib)
├── InstallDev/ # Development package layout (headers and libs for SDK integration)
├── library/ # Pre-built static and shared libraries
│ ├── glibc/ # Libraries compiled against glibc C runtime
│ ├── musl/ # Libraries compiled against musl C runtime (for lightweight systems)
│ └── out/ # Intermediate static libraries generated during build
├── memory/ # Memory management abstraction layer
│ ├── ionMemory/ # ION-based memory allocator for Linux kernel (Allwinner SoC)
│ └── secureMemory/ # Secure memory allocation for protected content (e.g., DRM)
└── vencoder/ # Video encoder implementation
├── base/ # Encoder core components: bitstream/frame buffer managers
└── libcodec/v2/ # V2 architecture of the video encoding codec backend
视频编码库使用
本章详细介绍Allwinner视频编码库的使用方法,包括编码流程、接口调用顺序、参数配置以及常见问题处理,帮助开发者快速掌握编码功能的实现。
必备条件
在开始使用视频编码库前,请确保满足以下条件:
- 了解基本的视频编码概念(I帧、P帧、码率、像素格式等)
- 熟悉C/C++编程语言和Linux/Android开发环境
- 准备好待编码的原始视频帧数据(支持YUV420P、NV12等像素格式)
- 确保系统有足够的内存资源分配给编码器
编码控制模块使用流程
Allwinner视频编码库提供了一套完整的接口流程,用户需按照规范的步骤进行操作。具体的使用流程可参考下图所示:
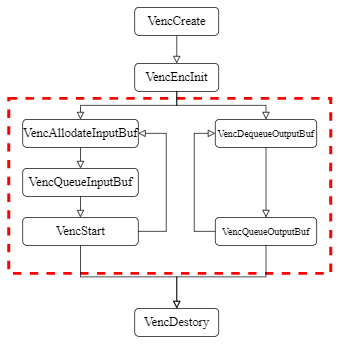
该图展示了视频编码的整体流程,包括初始化、编码循环和资源释放三个主要阶段,接下来会对这三部分进行说明:
- 创建编码器实例并初始化
在开始编码前,必须调用以下函数进行初始化:
// 初始化编码器参数
encode_param_t encode_param;
memset(&encode_param, 0, sizeof(encode_param));
encode_param.src_width = 1280;
encode_param.src_height = 736;
encode_param.dst_width = 1280;
encode_param.dst_height = 736;
encode_param.bit_rate = 2*1024*1024;
encode_param.frame_rate = 30;
encode_param.maxKeyFrame = 30;
encode_param.encode_format = VENC_CODEC_H264;
...
// 创建视频编码器实例
VENC_HANDLE pVideoEnc = VencCreate(encode_param.encode_format);
// 初始化编码器
int ret = VencInit(pVideoEnc, &baseConfig);
if (ret != 0) {
printf("初始化编码器失败!\n");
VideoEncDestroy(pVideoEnc);
return -1;
}
- 执行编码处理
初始化完成后,执行核心编码流程。该流程需在每次处理一帧数据时重复执行,分为输入帧处理和输出码流获取两个子流程:
a. 输入帧处理流程
// 从编码器获取一个已分配的输入缓冲区
pInputBufInfo = dequeueInputBuf(&pEncContext->mInputBufMgr.valid_quene);
memcpy(&mCurInputBuf, &pInputBufInfo->inputbuffer, sizeof(VencInputBuffer));
if(pInputBufInfo == NULL)
{
logv(" get input buffer failed");
USLEEP(10*1000);
return 1;
}
// 读取YUV数据到缓冲区(假设已打开输入文件in_file)
// Y分量
fread(mCurInputBuf.pAddrVirY, 1, bufferParam->nSizeY, in_file);
// UV分量
fread(mCurInputBuf.pAddrVirY, 1, bufferParam->nSizeY, in_file);
// 添加缓冲区并执行编码
enqueueInputBuf(&pEncContext->mInputBufMgr.empty_quene, pInputBufInfo);
VencQueueInputBuf(pEncContext->pVideoEnc, &mCurInputBuf);
VencStart(pVideoEnc);
if (ret != 0) {
printf("编码一帧失败!\n");
return -1;
}
b. 输出码流获取流程
// 获取编码后的码流帧
result = VencDequeueOutputBuf(pVideoEnc, &outputBuffer);
if(result == VENC_RESULT_BITSTREAM_IS_EMPTY)
{
logv("bitstream is empty ,continue");
break;
}
FWRITE(outputBuffer.pData0, 1, outputBuffer.nSize0, out_file);
//归还outputBuffer
VencQueueOutputBuf(pVideoEnc, &outputBuffer);
输入和输出流程可以并行处理,但需注意线程安全。
- 销毁编码器
当所有视频帧处理完毕后,应按以下步骤释放编码器资源:
// 销毁编码器实例
VencDestroy(pVideoEnc);
pVideoEnc = NULL; // 避免悬空指针
确保在程序退出前释放所有编码资源。
编码demo程序使用说明
由于编码demo程序的迭代速度较快,且会针对不同产品做出特性功能开发,故以下说明仅供参考,具体情况请以实际情况为准。
- demo路径
编码demo在Android的sdk中的具体路径为:android/frameworks/av/media/libcedarc/demo/vencoderDemo;
若开发环境为linux,则位于platform/Allwinner/multimedia/libcedarc/demo/vencoderDemo文件夹下。
- 基本参数介绍
在运行编码器demo时,即demoVencoder(以下简称demo),通过输入不同参数来实现不同的编码功能,目前demo中主流的参数配置如下所示:(以下所属环境为linux5.15系统)
在无法确定当前所使用编码器支持哪些参数输入时,则可以运行demo加上参数-h,即
./demoVencoder -h
将当前demo所支持的输入参数打印出来,可以根据该提示进行使用。
-i --input Input file path
-n --encode_frame_num After encoder n frames, encoder stop
-f --encode_format 0:h264 encoder, 1:jpeg_encoder, 3:h265 encoder
-o --output output file path
-s --srcsize src_size,can be 1920x1080 or 2160,1080,720,480,288
-d --dstsize dst_size,can be 1920x1080 or 2160,1080,720,480,288
-c --compare compare file:reference file path
-q --frequency frequency: the frequency of video engine
-b --bitrate bitRate:kbps
-sr --src_framerate src_framerate:fps
-dr --dst_framerate dst_framerate:fps
-v --vbv_size vbv_size:byte
-gs --gop_size Gop Size:
-kp --key_frm_period Key Frame Period
-gm --gop_mode Gop Mode
-rm --rc_mode RC Mode
-pm --product_mode ProductMode
-in --is_night Is Night
-st --sensor_type Sensor Type
-mt --moving_th Moving Th
-qua --quality Quality
-t --test_cycle Cycle num of testing
-l --logfile Log file path
-overlay --overlay add the overlay function
-overlay_in --overlay_int overlay intput data file
-lbc --lbc 1: no lossy lbc, 2: lossy_2x, 3: lossy_2.5x
-afbc --afbc 1: test afbc input data format
-limit_sp --limit speed 1: limit encoder speed by framerate
-i_qp_min --i qp min set the i_qp_min value
-i_qp_max --i qp max set the i_qp_max value
-p_qp_min --p qp min set the p_qp_min value
-p_qp_max --p qp max set the p_qp_max value
-qp_init --qp init set the qp_init value
-enc_num --encoder num create multi encoder
-pformat --pixel formatt set pixel format
-profile --profile set profile
-level --level set level
-ext_flag --ext_flag --ext_flag
-roi_wb --roi_wb test roi wbyuv.
-rotate --rotate test rotate, 0, 90, 180, 270
-hflip --hflip test hflip
-wb --wb test YUV WB
-wb_ratio --wb_ratio test YUV WB scaler ratio 1: 1/8; 2: 1/2; 3: 1/4
-gdc --gdc test gdc function
-gdc_mode --gdc_mode set gdc mode. 8: Warp_User
-ispbe --ispbe test ispbe function
-crop --crop test sw(1) hw(2) crop
-virz --vir_zoom test virtual zoom
-ir --intra_refresh test intra refresh
-vcu_on --vcu_on vcu: 0-vcu disable, 1-vcu enable
-vcu_auto --vcu auto mode vcu: 1-auto mode, 0-triger mode
-share_num --share buf num --share buf num
-share_bk --share buf bk --share buf bk
-enc_ch0 --enc channle0 --enc channle0
-enc_ch1 --enc channle1 --enc channle1
-enc_ch2 --enc channle2 --enc channle2
-enc_ch3 --enc channle3 --enc channle3
-enc_ch4 --enc channle4 --enc channle4
-enc_ch5 --enc channle5 --enc channle4
-enc_ch6 --enc channle6 --enc channle4
-enc_ch7 --enc channle7 --enc channle4
-enc_ch8 --enc channle8 --enc channle4
-s_1 --srcsize1 src_size2,can be 1920x1080 or 2160,1080,720,480,288
-d_1 --dstsize1 dst_size1,can be 1920x1080 or 2160,1080,720,480,288
-bb --bb test bounding box.
-gray --gray test gray.
-rec_lbc_mode --rec_lbc_mode --0: disable, 1:1.5x , 2: 2.0x, 3: 2.5x, 4: no_lossy
-sei --sei_num -----------
- 实例分析
本节提供编码器的详细使用示例,包括不同参数配置场景、日志分析方法以及结果验证步骤,帮助开发者快速上手并解决常见问题。
a. 基础参数配置
Ⅰ. 标准H.264编码示例
使用标准YUV420P视频源进行H.264编码测试:
./demoVencoder -f 0 -n 50 -pformat 2 -i 720p.yuv -o output.h264 -s 1280x720 -d 1280x720 -vcu_on 1 -vcu_auto 1
| 参数 | 说明 | 取值范围 | 示例值 |
|---|---|---|---|
| -i | 输入YUV文件路径 | 有效文件路径7 | 720p.yuv |
| -o | 输出码流文件路径 | 可写文件路径 | output.h264 |
| -s | 视频源尺寸 | W×H格式,支持多种分辨率 | 1280x720 |
| -d | 输出码流尺寸 | W×H格式,与源尺寸一致或缩放 | 1280x720 |
| -f | 编码器类型 | 0:H264, 1:JPEG | 0 |
| -pformat | 视频源像素格式 | 0:YUYV, 1:NV12, 2:YUV420P | 2 |
| -n | 编码总帧数 | >0 | 100 |
| -vcu_on | 开启VCU模式 | 0-1 | 1 |
| -vcu_auto | 开启vcu_auto模式 | 0-1 | 1 |
视频源分辨率和输出码流的尺寸必须严格按照 W×H(宽×高)的格式进行配置。
vcu_on和vcu_auto在V861上必须开启
Ⅱ. 不同编码场景示例
运动编码场景:
./demoVencoder -f 0 -n 50 -pformat 2 -i 720p.yuv -o output.h264 -s 1280x720 -d 1280x720 -vcu_on 1 -vcu_auto 1 -i_qp_min 5 -i_qp_max 15
高画质编码场景:
./demoVencoder -f 0 -n 50 -pformat 2 -i 720p.yuv -o output.h264 -s 1280x720 -d 1280x720 -vcu_on 1 -vcu_auto 1 -b 5242880
JPEG编码示例:
./demoVencoder -f 1 -n 1 -pformat 2 -i 720p.yuv -o output.jpeg -s 1280x720 -d 1280x720 -vcu_on 1 -vcu_auto 1
b. 日志分析详解
运行日志包含丰富的编码信息,以下是关键日志解析:
***************************************************************
*******test begin time[13318s] *******
***************************************************************
*************[0] cycle demo start time[13318s]**************
******************************
encode_format:3 0:h264,1:jpeg,3:h265
encode:50 frames
test lbc: 0
pixel_format: 2
get input file: ./720P.yuv
get output file: 1280x720
get src_size: 1280x720
get dst_size: 1280x720
vbv size: 8388608byte
share_buf_num: 2
extend_flag: 0
hflip: 0
rotate_value: 0
bEnCrop: 0, l320t120w640h480
gdc_en: 0
gdc_mode: 0
test overlay flag: 0
get overlay file: /tmp/01_argb_464x32_time.dat
ispbe_en: 0
wb_yuv: 0
******************************
[13318.239] DEBUG : cdc <ChannelThread:3794>: tmpOutput_path = 1280x720_0.h265
[13318.240] DEBUG : cdc <ChannelThread:3808>: open log_file fail
[13318.240] DEBUG : cdc <veEnvInit:182>: VeContext 0x84af9820, encoder 0, decodec 1
[13318.240] INFO : cdc <veEnvInit:211>: open /dev/cedar_dev fd = 5
[13318.240] DEBUG : cdc <veEnvInit:220>: get ve_reg_addr = 0x84a3a000
[13318.240] DEBUG : cdc <getIcVersion:43>: ** address_macc 0x84a3a000 ve_top_offset = 0x800
[13318.240] DEBUG : cdc <getIcVersion:94>: *** ic_version = 0x1001000021410
[13318.241] DEBUG : cdc <checkFeatureSupport:1525>: bEnableVcuFuncFlag = 0, nEncoderFlag = 0
[13318.241] DEBUG : cdc <VeInitialize:1798>: address_macc = 0x84a3a000, address_vetop = 0x84a3a800
[13318.241] DEBUG : cdc <getSocInfo:1316>: not exist SocInfo plugin, use SocInfo node
[13318.241] DEBUG : cdc <VeInitialize:1801>: *** ic_version = 0x1001000021410
[13318.241] DEBUG : cdc <VeInitialize:1858>: *** nPhyOffset = 0x0
[13318.241] DEBUG : cdc <CdcIonOpen:320>: open /dev/dma_heap/size_pool
[13318.241] DEBUG : cdc <ChannelThread:3878>: baseConfig.eInputFormat = 2
[13318.241] DEBUG : cdc <ChannelThread:3985>: encode_param.encode_format:3
[13318.242] DEBUG : cdc <CdcIniParserInit:38>: load conf file /etc/cedarc.conf ok!
[13318.242] DEBUG : cdc <VencCreate:717>: now cedarc log level:5
[13318.243] WARNING: cdc <setEncParamBeforeInit:2578>: sei_num:0, nType:0, nLength:12, pBuffer(0):(null)
[13318.244] WARNING: cdc <H265SetFbm:7705>: not implement now
[13318.267] WARNING: cdc <offlineGroupNum_init:318>: ** bEnableDynamicConfig = 1
[13318.269] WARNING: cdc <h265regConfig_getDdrBufSize:848>: size info: mE3dFilter:3680, mDblk:10240, mMapInput:14720, mQpMadSseOut:22080
[13318.269] WARNING: cdc <h265regConfig_getDdrBufSize:852>: size info: mRefRecInfo:16384, mRefRecData:955392, mRefRecColMv:14720, mRefRecSubImg:61440, mRgnMv:16512, mColorBBox:1840
**had encoder frame num = 20
[13319.018] WARNING: cdc <ChannelThread:4385>: ch 0 encode stream fps 32
**had encoder frame num = 40
output file is saved:1280x720
*******[0]cycle demo end time[13319s] cur_cycle_time[1s]*******
***************************************************************
*******test end time[13319s] test_total_time[1s]*******
***************************************************************
c. 结果验证与分析
编码完成后,需要进行以下验证以确保编码质量和正确性:
Ⅰ. 文件存在性检查:
ls -lh 1280x720.h265
Ⅱ. 码流格式验证:
使用ffmpeg工具验证码流格式:
ffprobe -v quiet -print_format json -show_format -show_streams 1280x720.h265
预期输出应包含编码格式、分辨率、帧率等信息,确认与输入参数一致。
Ⅲ. 视频播放测试:
ffplay 1280x720.h265
调试方法
编译编码库
编码库编译是视频编码功能开发的基础环节,通过正确的编译配置可以生成适用于不同平台的编码器库文件。本小节介绍在Linux环境下编译libcedarc编码库的具体步骤,帮助开发者快速搭建编码开发环境。
必备条件
- 已获取完整的SDK源码包
- 配置好交叉编译工具链
- 具备基本的Linux命令行操作能力
- 足够的磁盘空间(建议至少100MB)
确认代码路径
根据开发平台定位编码库源码位置:
| 平台 | 源码路径 | 说明 |
|---|---|---|
| Tina | platform/Allwinner/multimedia/libcedarc | Tina Linux系统路径 |
注意:由于SDK结构可能更新,请以实际源码路径为准,必要时联系技术支持确认。
Linux环境编译配置
- 在SDK根目录设置编译工具链环境
source buile/envsetup.sh
lunch
- 跳转至编码库目录
clibcedarc_p
- 编译
mm -b
配置编码日志系统
简介
libcedarc编码器提供完整的日志记录系统,通过配置cedarc.conf文件可灵活控制日志输出级别和内容。合理配置日志系统有助于跟踪编码过程、快速定位问题并优化编码性能。本任务将指导您完成日志系统的配置,实现对编码过程的精准监控。
必备条件
- 已获取目标平台的cedarc.conf配置文件访问权限
- 了解基本的日志级别概念(ERROR/WARN/INFO/DEBUG)
- 确认编码器已正确部署并可运行
- 具备文件编辑权限
了解日志级别配置
日志系统提供五个级别,根据不同的调试场景选择合适的级别:
| 级别 | 数值 | 说明 | 使用场景 |
|---|---|---|---|
| VERBOSE | 2 | 详细信息 | 深度调试,开发阶段使用 |
| DEBUG | 3 | 调试信息 | 功能调试,问题排查 |
| INFO | 4 | 一般信息 | 正常流程状态、关键操作记录 |
| WARNING | 5 | 警告信息 | 非致命异常、性能瓶颈等 |
| ERROR | 6 | 错误信息 | 编码失败、参数错误等严重问题 |
定位cedarc.conf配置文件
不同平台的配置文件路径如下:
| 平台 | 配置文件路径 |
|---|---|
| Tina | /etc/cedarc.conf |
若配置文件不存在,请手动创建或修改源码中的默认配置。创建时需确保文件权限正确设置,以便编码器进程能够读取配置。
访问配置文件的命令示例:
cd /etc
cat cedarc.conf
配置日志级别参数
在cedarc.conf文件中配置以下参数控制日志输出:
## 日志输出规则: level >= log_level
## VERBOSE = 2,
## DEBUG = 3,
## INFO = 4,
## WARNING = 5,
## ERROR = 6,
cdc_log_level = 5
vdec_log_level = 5
venc_log_level = 5
确认成功
完成配置后,按以下步骤验证日志系统配置成功:
-
重新运行编码程序
./demoVencoder -f 0 -n 50 -pformat 2 -i 720p.yuv -o output.h264 -s 1280x720 -d 1280x720 -vcu_on 1 -vcu_auto 1 -
查看日志输出:
-
由于当前配置为WARNING级别(5),应只看到WARNING和ERROR级别的日志
-
检查日志中是否包含关键警告信息,如资源限制、参数建议等
-
在Linux系统上,可使用以下命令过滤日志:
dmesg | grep -i "cedarc"
-
典型问题排查
初始化失败
编码器初始化失败是常见问题,本节介绍排查方法。
可能原因:
- 设备节点不存在:检查驱动是否正确加载
- 权限问题:确认应用程序有设备访问权限
- 资源不足:检查内存和其他系统资源是否充足
- 硬件问题:编码器硬件可能存在故障
排查步骤:
- 检查设备节点:
ls -la /dev/cedar_dev - 检查权限设置:
sudo chmod +x ./demoVencoder - 查看内核日志:
dmesg | grep -i error
FAQ
编码质量问题
图像模糊
问题描述:编码后的视频图像模糊不清,细节丢失。
可能原因及解决方案:
- 码率过低:增加编码码率,提高图像质量
- 量化参数过大:减小QP值,降低压缩率
- 图像预处理不当:检查输入图像是否经过不当处理
- 编码预设设置不合理:调整编码预设,平衡质量和性能
优化建议:
// 设置更高的码率
int bitrate = 8000000; // 8Mbps
VencSetParameter(pVideoEnc, VENC_IndexParamBitrate, &bitRate);
// 调整QP范围
VencQPRange qpRange;
QpRange.nMaxqp = encode_param->h264_func.h264Param.sQPRange.nMaxqp;
QpRange.nMinqp = encode_param->h264_func.h264Param.sQPRange.nMinqp;
VencSetParameter(pVideoEnc, VENC_IndexParamH264QPRange, (void *)&QpRange);
运动模糊
问题描述:运动场景中出现严重的模糊或拖尾。
可能原因及解决方案:
- 帧率过低:提高编码帧率,减少运动模糊
- 码率分配不合理:调整码率控制策略,为运动场景分配更多码率
优化配置:
// 提高帧率
int framerate = 60;
VencSetParameter(pVideoEnc, VENC_IndexParamFramerate, &framerate);
// 调整QP范围
VencQPRange qpRange;
QpRange.nMaxqp = encode_param->h264_func.h264Param.sQPRange.nMaxqp;
QpRange.nMinqp = encode_param->h264_func.h264Param.sQPRange.nMinqp;
VencSetParameter(pVideoEnc, VENC_IndexParamH264QPRange, (void *)&QpRange);
性能优化
编码速度慢
问题描述:编码速度达不到实时要求,延迟较高。
可能原因及解决方案:
- 分辨率过高:适当降低编码分辨率
- 复杂度过高:调整编码复杂度参数
- 硬件资源不足:检查CPU使用率和内存占用
- 编码器未正确初始化:确保编码器参数设置合理
内存泄漏
问题描述:长时间运行后系统内存不足,出现内存泄漏。
可能原因及解决方案:
- 缓冲区未释放:确保正确释放输入输出缓冲区
- 编码器未销毁:编码结束后调用销毁函数
- 重复初始化:避免重复创建编码器实例
正确的资源管理:
// 正确释放编码器资源
VencDestroy(pVideoEnc);
// 释放申请的内存
EncAdapterMemPfree(pRoiConfig.pRoiYAddrVir);
// 释放码流缓冲区
EncAdapterMemPfree(pRoiConfig.pRoiCAddrVir);
常见错误处理
编码失败
问题描述:调用VencStart返回错误。
可能原因及解决方案:
- 输入数据异常:检查输入缓冲区数据是否正确
- 参数设置错误:验证编码器参数设置
- 硬件故障:检查编码器硬件状态
处理示例:
int result = VencStart(pVideoEnc);
if(result < 0)
{
logd("encoder error, goto out");
// 执行清理操作
goto out;
}
文件读取失败
问题描述:无法正确读取输入文件数据。
可能原因及解决方案:
- 文件路径错误:检查输入文件路径是否正确
- 文件权限问题:确认有文件读取权限
- 文件格式不支持:确保文件格式与编码器匹配
文件读取检查:
FILE* in_file = fopen(input_file_path, "rb");
if(in_file == NULL)
{
loge("open input file error\n");
return -1;
}
// 检查读取的数据大小
unsigned int size1 = fread(inputBuffer.pAddrVirY, 1, bufferParam.nSizeY, in_file);
if(size1 != bufferParam.nSizeY)
{
loge("read file data error\n");
return -1;
}
参数配置
如何设置ROI区域
说明:感兴趣区域(ROI)可以为特定区域分配更多码率,提高该区域的编码质量。
配置方法:
VencROIConfig roiConfig[4];
// 配置第一个ROI区域
sRoiConfig[0].bEnable = 1;
sRoiConfig[0].index = 0;
sRoiConfig[0].nQPoffset = 10;
sRoiConfig[0].sRect.nLeft = 0;
sRoiConfig[0].sRect.nTop = 0;
sRoiConfig[0].sRect.nWidth = 1280;
sRoiConfig[0].sRect.nHeight = 320;
// 设置ROI参数
VencSetParameter(pVideoEnc, VENC_IndexParamROIConfig, &h264_func.sRoiConfig[0]);
附录
vencoder 函数文档
vencoderDeviceCreate
【目的】
创建编码器设备实例。
【语法】
VENC_DEVICE* vencoderDeviceCreate(VENC_CODEC_TYPE type);
【参数】
type: 编码器类型,详见 VENC_CODEC_TYPE 枚举
【返回值】
成功返回指向新创建设备的指针,失败返回NULL。
【结构体定义】
// 编码器类型枚举
typedef enum VENC_CODEC_TYPE {
VENC_CODEC_H264, // H.264编码器
VENC_CODEC_JPEG, // JPEG编码器
VENC_CODEC_H264_VER2, // H.264版本2编码器
VENC_CODEC_H265, // H.265编码器
VENC_CODEC_VP8, // VP8编码器
VENC_CODEC_CNT, // 编码器数量计数
} VENC_CODEC_TYPE;
// 设备结构体
typedef struct VENC_DEVICE
{
const char *codecType; // 编码器类型描述
// 设备操作函数指针
void* (*open)(VencBaseConfig* pBaseConfig, unsigned int nIcVersion);
int (*init)(void *handle, VencBaseConfig* pBaseConfig);
int (*uninit)(void *handle);
void (*close)(void *handle);
int (*encode)(void *handle, VencInputBuffer* pInBuffer);
int (*GetParameter)(void *handle, int indexType, void* param);
int (*SetParameter)(void *handle, int indexType, void* param);
int (*ValidBitStreamFrameNum)(void *handle);
int (*GetOneBitStreamFrame)(void *handle, VencOutputBuffer *pOutBuffer);
int (*FreeOneBitStreamFrame)(void *handle, VencOutputBuffer *pOutBuffer);
int (*ResetBitStreamFrame)(void *handle);
int (*GetBitStreamUnReturnNum)(void *handle);
int (*GetBitStreamUnReadNum)(void *handle);
int (*SetCallback)(void *handle, VencDeviceCbType* pCallbacks, void* pPrivateData);
void* (*GetVcs)(void *handle);
int (*SetFbm)(void *handle, FrameBufferManager *pFbm);
int (*RequestHwStaticBuf)(void *handle);
int (*ReturnHwStaticBuf)(void *handle);
} VENC_DEVICE;
【使用示例】
// 创建H.264编码器设备
VENC_DEVICE* pDevice = vencoderDeviceCreate(VENC_CODEC_H264);
if (pDevice == NULL) {
printf("创建编码器设备失败\n");
return -1;
}
【注意事项】
type参数必须为有效的VENC_CODEC_TYPE枚举值,需要足够的系统内存来创建设备对象,设备创建成功后必须调用vencoderDeviceDestroy释放资源,该函数为内部函数通常通过高级接口VencCreate间接调用
enableCheckOnlineStatus
【目的】
启用或禁用编码器的在线检查状态功能。
【语法】
static void enableCheckOnlineStatus(void);
【参数】
无
【返回值】
无
【使用示例】
unsigned int bEnableCheckOnlineStatus = 1; // 1-启用,0-禁用
VencSetParameter(pEncoder, VENC_IndexParamEnableCheckOnlineStatus, &bEnableCheckOnlineStatus);
【注意事项】
参数 bEnableCheckOnlineStatus 为 unsigned int 类型,取值范围:1(启用在线检查)、0(禁用在线检查)。仅在在线模式下有效。该函数为内部静态函数,通常通过VencSetParameter间接调用。
flushInputBuffer
【目的】
刷新编码器的输入缓冲区,清空所有未处理的输入帧数据。
【语法】
static int flushInputBuffer(VideoEncoder* pEncoder);
【参数】
pEncoder: 指向视频编码器实例的指针(VideoEncoder*类型)
【返回值】
- 成功返回0
- 失败返回负值错误码
【使用示例】
int ret = flushInputBuffer(pEncoder);
if(ret != 0) {
printf("刷新输入缓冲区失败\n");
}
【注意事项】
pEncoder 必须为有效的编码器指针,编码器需已初始化。调用后会丢弃所有未处理的输入帧,在实时编码场景中需谨慎使用。
VencCreate
【目的】
创建视频编码器实例。
【语法】
VideoEncoder* VencCreate(VENC_CODEC_TYPE eCodecType);
【参数】
eCodecType: 编码器类型,指定要创建的编码器种类
【VideoEncoder类型定义】
typedef void VideoEncoder; // 编码器句柄类型,用于安全访问内部实现
【使用示例】
VideoEncoder* pEncoder = VencCreate(VENC_CODEC_H264);
if(pEncoder == NULL) {
printf("创建编码器失败\n");
return -1;
}
【VencContext结构体关键成员】
typedef struct VencContext {
VENC_CODEC_TYPE codecType; // 编码器类型
int bInit; // 初始化标志
VENC_DEVICE* pVEncDevice; // 编码设备指针
void* pEncoderHandle; // 编码器句柄
VencBaseConfig baseConfig; // 基础配置
// ... 其他成员 ...
} VencContext;
【注意事项】
参数 eCodecType 为 VENC_CODEC_TYPE 类型,可选值包括 VENC_CODEC_H264、VENC_CODEC_JPEG、VENC_CODEC_H265 等。需要足够的系统内存和硬件资源。使用完毕后必须调用 VencDestroy 释放资源。
VencDestroy
【目的】
销毁视频编码器实例并释放所有相关资源。
【语法】
void VencDestroy(VideoEncoder* pEncoder);
【参数】
pEncoder: 指向要销毁的视频编码器实例的指针
【返回值】
无
【资源清理流程】
- 检查编码器状态,如果是运行状态则停止编码线程
- 如果是在线模式,清理在线通道资源
- 销毁消息队列和信号量
- 释放VencContext结构体内存
- 清理视频引擎(VE)资源
【使用示例】
VencDestroy(pEncoder);
pEncoder = NULL; // 避免悬空指针
【注意事项】
参数 pEncoder 必须为有效的编码器指针。建议在非运行状态下调用,避免并发访问。销毁后编码器句柄变为无效,应将指针设为NULL避免误用。
VencInit
【目的】
初始化视频编码器,使用指定配置参数完成硬件配置、缓冲区管理、回调设置等初始化工作。
【语法】
int VencInit(VideoEncoder* pEncoder, VencBaseConfig* pConfig);
【参数】
pEncoder: 指向视频编码器实例的指针pConfig: 指向基础配置结构体的指针
【返回值】
- 成功返回VENC_RESULT_OK (0)
- 失败返回负值错误码(如VENC_RESULT_NULL_PTR、VENC_RESULT_NO_MEMORY等)
【VencBaseConfig结构体详解】 基础配置结构体定义:
typedef struct VencBaseConfig {
unsigned char bEncH264Nalu; // H264 NALU输出标志
unsigned int nInputWidth; // 输入图像宽度
unsigned int nInputHeight; // 输入图像高度
unsigned int nDstWidth; // 输出图像宽度
unsigned int nDstHeight; // 输出图像高度
unsigned int nStride; // 图像步长
VENC_PIXEL_FMT eInputFormat; // 输入像素格式
VENC_OUTPUT_FMT eOutputFormat; // 输出格式
struct ScMemOpsS *memops; // 内存操作集
VeOpsS *veOpsS; // VE操作集
void *pVeOpsSelf; // VE操作集自指针
unsigned char bOnlyWbFlag; // 仅写回标志
//* LBC压缩配置(适用于特定硬件平台)
unsigned char bLbcLossyComEnFlag1_5x; // 1.5x LBC压缩
unsigned char bLbcLossyComEnFlag2x; // 2.0x LBC压缩
unsigned char bLbcLossyComEnFlag2_5x; // 2.5x LBC压缩
unsigned char bIsVbvNoCache; // VBV无缓存标志
unsigned int extend_flag; // 扩展标志
unsigned int nChannel; // 通道号
unsigned int bVcuOn; // VCU开关
unsigned int bVcuAutoMode; // VCU自动模式
unsigned int bOnlineMode; // 在线模式标志
unsigned int bOnlineChannel; // 在线通道标志
unsigned int nOnlineShareBufNum; // 在线共享缓冲区数量
unsigned int nOnlineShareBufBk; // 在线共享缓冲区备份
unsigned int sensor_id; // 传感器ID
unsigned int bk_id; // 备份ID
eVeLbcMode rec_lbc_mode; // LBC模式
int channel_id; // 通道ID
unsigned int bEnableMultiOnlineSensor; // 多在线传感器
unsigned int bEnableImageStitching; // 图像拼接
unsigned int bEnableRxInputBufmultiplex; // 输入缓冲区复用
unsigned int bEnableInsertPicture; // 插入图像
} VencBaseConfig;
【VENC_PIXEL_FMT枚举】 输入像素格式定义:
typedef enum VENC_PIXEL_FMT {
VENC_PIXEL_FMT_YUV420SP = 0, // YUV420SemiPlanar
VENC_PIXEL_FMT_YUV420P, // YUV420Planar
VENC_PIXEL_FMT_RGB565, // RGB565格式
VENC_PIXEL_FMT_BGR565, // BGR565格式
VENC_PIXEL_FMT_RGB888, // RGB888格式
VENC_PIXEL_FMT_BGR888, // BGR888格式
VENC_PIXEL_FMT_ARGB8888, // ARGB8888格式
VENC_PIXEL_FMT_ABGR8888, // ABGR8888格式
VENC_PIXEL_FMT_RGBA8888, // RGBA8888格式
VENC_PIXEL_FMT_BGRA8888, // BGRA8888格式
} VENC_PIXEL_FMT;
【使用示例】
int ret = VencInit(pEncoder, &baseConfig);
if(ret != VENC_RESULT_OK) {
printf("初始化编码器失败\n");
return -1;
}
【注意事项】
参数 pEncoder 必须为有效指针,pConfig 必须为完整的配置结构体指针。编码器需已创建且配置参数需在硬件支持范围内。
VencStart
【目的】
启动视频编码过程,将编码器状态从INITED或PAUSE状态转换为EXECUTING状态,开始处理输入帧数据并生成编码输出。
【语法】
int VencStart(VideoEncoder* pEncoder);
【参数】
pEncoder: 指向视频编码器实例的指针
【返回值】
- 成功返回VENC_RESULT_OK (0)
- 失败返回负值错误码
【编码器状态管理】 编码器状态枚举定义:
typedef enum VENCODER_STATE {
VENCODER_STATE_IDLE = 0, // 空闲状态
VENCODER_STATE_INITED, // 已初始化状态
VENCODER_STATE_EXCUTING, // 执行中状态
VENCODER_STATE_PAUSE, // 暂停状态
} VENCODER_STATE;
【使用示例】
int ret = VencStart(pEncoder);
if(ret != VENC_RESULT_OK) {
printf("启动编码器失败\n");
return -1;
}
【注意事项】
参数 pEncoder 必须为有效指针。编码器需已成功初始化且状态为INITED或PAUSE。在线模式需确保通道状态正常。
VencPause
【目的】
暂停视频编码过程,将编码器状态从EXECUTING状态转换为PAUSE状态,停止处理新的输入帧,但保持内部状态和缓冲区数据。
【语法】
int VencPause(VideoEncoder* pEncoder);
【参数】
pEncoder: 指向视频编码器实例的指针
【返回值】
- 成功返回VENC_RESULT_OK (0)
- 失败返回负值错误码
【使用示例】
int ret = VencPause(pEncoder);
if(ret != VENC_RESULT_OK) {
printf("暂停编码器失败\n");
return -1;
}
【注意事项】
参数 pEncoder 必须为有效指针。编码器需处于EXECUTING状态。暂停期间应避免调用需要编码器运行的方法。
VencReset
【目的】
重置视频编码器状态和内部缓冲区,清除所有缓冲数据,释放部分资源,保留编码器实例但不释放。
【语法】
int VencReset(VideoEncoder* pEncoder);
【参数】
pEncoder: 指向视频编码器实例的指针
【返回值】
- 成功返回VENC_RESULT_OK (0)
- 失败返回负值错误码
【使用示例】
int ret = VencReset(pEncoder);
if(ret != VENC_RESULT_OK) {
printf("重置编码器失败\n");
return -1;
}
【注意事项】
参数 pEncoder 必须为有效指针。编码器需处于PAUSE或STOPPED状态。重置后需重新调用VencInit初始化。
VencFlush
【目的】
刷新视频编码器的输入和输出缓冲区,强制处理完所有等待编码的输入帧,刷新剩余编码数据。
【语法】
int VencFlush(VideoEncoder* pEncoder);
【参数】
pEncoder: 指向视频编码器实例的指针
【返回值】
- 成功返回VENC_RESULT_OK (0)
- 失败返回负值错误码
【使用示例】
int ret = VencFlush(pEncoder);
if(ret != VENC_RESULT_OK) {
printf("刷新编码器失败\n");
return -1;
}
【注意事项】
参数 pEncoder 必须为有效指针。编码器需已创建并初始化,状态为EXECUTING或PAUSE。刷新过程可能引入延迟。
SetVeSuspend
【目的】
设置视频编码器进入挂起状态,使VE硬件进入低功耗状态,释放硬件资源占用降低能耗。
【语法】
int SetVeSuspend(VideoEncoder* pEncoder);
【参数】
pEncoder: 指向视频编码器实例的指针
【返回值】
- 成功返回VENC_RESULT_OK (0)
- 失败返回负值错误码
【使用示例】
int ret = SetVeSuspend(pEncoder);
if(ret != VENC_RESULT_OK) {
printf("挂起编码器失败\n");
return -1;
}
【注意事项】
pEncoder为指向视频编码器实例的指针,用于挂起编码器进入低功耗状态,编码器必须处于EXECUTING或PAUSE状态。
SetVeResume
【目的】
恢复视频编码器从挂起状态,重新激活编码器恢复VE硬件占用,使编码器恢复到挂起前的工作状态。
【语法】
int SetVeResume(VideoEncoder* pEncoder);
【参数】
pEncoder: 指向视频编码器实例的指针
【返回值】
- 成功返回VENC_RESULT_OK (0)
- 失败返回负值错误码
【使用示例】
int ret = SetVeResume(pEncoder);
if(ret != VENC_RESULT_OK) {
printf("恢复编码器失败\n");
return -1;
}
【注意事项】
pEncoder为指向视频编码器实例的指针,用于恢复挂起状态的编码器,编码器必须处于SUSPENDED状态。
updateOverlayParam
【目的】
更新视频编码器中的覆盖层参数,用于动态更新叠加到视频帧上的图像或文本内容,实现水印、字幕、logo等实时叠加效果。
【语法】
int updateOverlayParam(VideoEncoder* pEncoder, OverlayParam* pParam);
【参数】
pEncoder: 指向视频编码器实例的指针pParam: 指向OverlayParam结构体的指针,包含要更新的叠加层参数
【返回值】
- 成功返回VENC_RESULT_OK (0)
- 失败返回负值错误码
【使用示例】
OverlayParam overlayParam;
memset(&overlayParam, 0, sizeof(OverlayParam));
overlayParam.enable = 1;
overlayParam.x = 50;
overlayParam.y = 50;
overlayParam.width = 100;
overlayParam.height = 50;
overlayParam.alpha = 128;
int ret = updateOverlayParam(pEncoder, &overlayParam);
if(ret != VENC_RESULT_OK) {
printf("更新overlay参数失败\n");
return -1;
}
【注意事项】
pEncoder为指向视频编码器实例的指针,pParam为指向OverlayParam结构体的指针,用于动态更新叠加到视频帧上的水印、字幕等内容,参数更新将在下一个编码帧中生效。
VencGetParameter
【目的】 获取视频编码器的各种运行时参数,查询编码器当前配置状态、性能指标和运行时信息。
【语法】
int VencGetParameter(VideoEncoder* pEncoder, int nIndex, void* pParam);
【参数】
-
pEncoder: 指向视频编码器实例的指针 -
nIndex: 参数索引,决定了要获取的具体参数类型 -
pParam: 指向存储参数值的缓冲区指针,内存由调用方分配
【返回值】 成功返回VENC_RESULT_OK (0),失败返回负值错误码
【使用示例】
VencGetParameter(pEncoder, VENC_IndexParamBitrate, &bitrate);
【注意事项】
pEncoder为指向视频编码器实例指针,nIndex为参数索引指定获取的参数类型,pParam为存储参数的缓冲区指针,缓冲区大小需与参数类型匹配,成功返回VENC_RESULT_OK。
VencSetParameter
【目的】 设置编码器的各种运行时参数。
【语法】
int VencSetParameter(VideoEncoder* pEncoder, int indexType, void* paramData);
【参数】
-
pEncoder: 指向编码器实例的指针 -
indexType: 参数类型标识符,决定了要设置的具体参数类别 -
paramData: 指向具体参数数据的指针,其类型取决于indexType
【返回值】
成功返回0,失败返回负值错误码
【使用示例】
VencSetParameter(pEncoder, VENC_IndexParamBitrate, &bitrate);
【常用参数类型示例】
以下是常用VENC_INDEXTYPE参数的使用示例和说明:
1. 码率控制参数
Ⅰ. VENC_IndexParamBitrate
功能说明:设置编码目标码率,单位bps
取值范围:根据编码器支持能力,通常为1000~50000000
用法示例:
// 设置编码器码率为2Mbps
int bitrate = 2000000;
VencSetParameter(pEncoder, VENC_IndexParamBitrate, &bitrate);
Ⅱ. VENC_IndexParamFramerate
功能说明:设置输入视频帧率,单位fps
取值范围:1~60,常用值为25/30
用法示例:
// 设置帧率为30fps
int framerate = 30;
VencSetParameter(pEncoder, VENC_IndexParamFramerate, &framerate);
Ⅲ. VENC_IndexParamMaxKeyInterval
功能说明:设置最大关键帧间隔,单位帧数
取值范围:1~255,0表示仅第一帧为关键帧
用法示例:
// 设置关键帧间隔为2秒
int keyInterval = 60; // 30fps * 2s = 60帧
VencSetParameter(pEncoder, VENC_IndexParamMaxKeyInterval, &keyInterval);
2. 视频编码参数
Ⅰ. VENC_IndexParamH264Param
功能说明:设置H.264编码基本参数,包括profile、level、量化参数和熵编码模式
取值范围:
-
nProfile:66(baseline), 77(main), 100(high)
-
nLevel:10~51,表示H.264 level
-
nQP:0~51,值越小质量越高码率越大
-
bEntropyCABAC:0(CAVLC), 1(CABAC)
用法示例:
// 设置H.264编码参数
VencH264Param h264Param = {0};
h264Param.sProfileLevel.nProfile = 66; // 66: baseline, 77: main, 100: high
h264Param.sProfileLevel.nLevel = 31; // H.264 level 3.1
h264Param.sQPRange.nMaxqp = 28; // 量化参数
h264Param.bEntropyCodingCABAC = 1; // 启用CABAC熵编码
VencSetParameter(pEncoder, VENC_IndexParamH264Param, &h264Param);
Ⅱ. VENC_IndexParamColorFormat
功能说明:设置输入图像颜色格式
取值范围:VENC_PIXEL_YUV420SP, VENC_PIXEL_YUV420P, VENC_PIXEL_YVU420SP等
用法示例:
// 设置颜色格式
VENC_PIXEL_FMT colorFormat = VENC_PIXEL_YUV420SP;
VencSetParameter(pEncoder, VENC_IndexParamColorFormat, &colorFormat);
3. 图像处理参数
I. 图像旋转 (VENC_IndexParamRotation)
功能说明:设置图像旋转角度,支持四种旋转方向
取值范围:
-
0:不旋转
-
1:顺时针旋转90度
-
2:旋转180度
-
3:顺时针旋转270度
用法示例:
int rotation = 1; // 顺时针旋转90度
VencSetParameter(pEncoder, VENC_IndexParamRotation, &rotation);
II. 水平翻转 (VENC_IndexParamHorizonFlip)
功能说明:设置图像水平翻转,将图像沿垂直轴镜像
取值范围:
-
0:不翻转
-
1:水平翻转
用法示例:
unsigned int horizonFlip = 1; // 启用水平翻转
VencSetParameter(pEncoder, VENC_IndexParamHorizonFlip, &horizonFlip);
4. ROI区域配置
I. ROI配置 (VENC_IndexParamROIConfig)
功能说明:设置感兴趣区域,ROI区域将获得更高质量,可用于重点区域增强
参数说明:
bEnable:启用/禁用ROI功能
-
取值范围:
-
0:禁用
-
1:启用
-
nRectNum:ROI矩形数量
- 取值范围:1~8
sRect:ROI矩形区域数组
-
nLeft/nTop:矩形左上角坐标
-
nWidth/nHeight:矩形宽度和高度
-
nQPDelta:ROI区域QP偏移值
-
取值范围:-51~51
-
负值:提高ROI区域质量
-
正值:降低ROI区域质量
-
用法示例:
VencROIConfig roiConfig = {0};
roiConfig.bEnable = 1; // 启用ROI功能
roiConfig.nRectNum = 1; // 设置1个ROI区域
roiConfig.sRect[0].nLeft = 100; // ROI区域左上角X坐标
roiConfig.sRect[0].nTop = 100; // ROI区域左上角Y坐标
roiConfig.sRect[0].nWidth = 200; // ROI区域宽度
roiConfig.sRect[0].nHeight = 150; // ROI区域高度
roiConfig.sRect[0].nQPDelta = -2; // ROI区域质量提升
VencSetParameter(pEncoder, VENC_IndexParamROIConfig, &roiConfig);
5. 包围盒功能
I. 包围盒配置 (VENC_IndexParamBoundingBox)
功能说明:在视频输出中绘制对象边界框,用于目标检测和跟踪可视化
结构体定义:
VencBoundingBoxCfg:包围盒配置结构体
-
bEnable:启用标志
- 0:禁用包围盒功能
- 1:启用包围盒功能
-
num:包围盒数量 取值范围:0~32
-
box_info:包围盒信息数组
-
color_info:颜色配置数组
VencBBoxInfo:单个包围盒信息结构体
-
box_line_width:包围盒边框线宽
- 取值范围:2~8,必须为2的倍数
-
box_color_id:边框颜色ID
- 取值范围:1~15,对应不同预设颜色
-
box_base_coor_x/y:包围盒左上角坐标
- 取值范围:0~8192,必须为2的倍数
-
box_width/heigh:包围盒宽高
- 取值范围:6~4096,必须为2的倍数
用法示例:
VencBoundingBoxCfg bbox_cfg = {0};
bbox_cfg.bEnable = 1; // 启用包围盒功能
bbox_cfg.num = 1; // 设置1个包围盒
// 配置第一个包围盒
bbox_cfg.box_info[0].box_line_width = 2; // 2像素线宽
bbox_cfg.box_info[0].box_color_id = 1; // 红色边框
bbox_cfg.box_info[0].box_base_coor_x = 100; // X坐标起点
bbox_cfg.box_info[0].box_base_coor_y = 50; // Y坐标起点
bbox_cfg.box_info[0].box_width = 200; // 宽度200像素
bbox_cfg.box_info[0].box_heigh = 150; // 高度150像素
// 设置包围盒参数
VencSetParameter(pEncoder, VENC_IndexParamBoundingBox, &bbox_cfg);
6. 量化参数设置
I. 固定QP值 (VENC_IndexParamH264FixQP)
功能说明:设置固定量化参数,不使用码率控制,适用于需要恒定质量的场景
参数说明:
bEnable:固定QP开关
-
0:禁用固定QP,使用码率控制
-
1:启用固定QP,不使用码率控制
nIQp:I帧QP值
取值范围:0~51
- 值越小,I帧质量越高,码率越大
nPQp:P帧QP值
取值范围:0~51
- 值越小,P帧质量越高,码率越大
用法示例:
VencFixQP fixQP = {0};
fixQP.bEnable = 1; // 启用固定QP
fixQP.nIQp = 25; // I帧QP值
fixQP.nPQp = 28; // P帧QP值
VencSetParameter(pEncoder, VENC_IndexParamH264FixQP, &fixQP);
II. QP范围设置 (VENC_IndexParamH264QPRange)
功能说明:设置量化参数波动范围,控制码率和质量波动,适用于码率控制模式
参数说明:
nMaxQp:最大QP值
取值范围:0~51
- 值越大,最低质量越低
nMinQp:最小QP值
取值范围:0~51
- 值越小,最高质量越高
nMaxPqp:最大P帧QP值
取值范围:0~51
- 控制预测帧的最大量化参数
nMinPqp:最小P帧QP值
取值范围:0~51
- 控制预测帧的最小量化参数
用法示例:
VencQPRange qpRange = {0};
qpRange.nMaxQp = 40; // 最大QP值
qpRange.nMinQp = 20; // 最小QP值
qpRange.nMaxPqp = 35; // 最大P帧QP
qpRange.nMinPqp = 25; // 最小P帧QP
VencSetParameter(pEncoder, VENC_IndexParamH264QPRange, &qpRange);
III. 色度QP偏移 (VENC_IndexParamChromaQPOffset)
功能说明:设置色度分量相对于亮度分量的QP偏移,调整色彩质量
取值范围:-12~12
-
负值:提高色度质量,增加色度码率
-
正值:降低色度质量,减少色度码率
-
0:色度与亮度使用相同QP
用法示例:
int chromaQPOffset = -2; // 提高色度质量
VencSetParameter(pEncoder, VENC_IndexParamChromaQPOffset, &chromaQPOffset);
7. 码率控制增强
I. 码率范围设置 (VENC_IndexParamSetBitRateRange)
功能说明:设置编码码率的波动范围,用于VBR码率控制,优化码率分配
参数说明: nMaxBitRate:最大码率
-
取值范围:1000~50000000bps
-
控制码率波动的上限
nMinBitRate:最小码率
-
取值范围:1000~50000000bps
-
控制码率波动的下限
用法示例:
VencBitRateRange bitRateRange = {0};
bitRateRange.nMaxBitRate = 3000000; // 最大码率:3Mbps
bitRateRange.nMinBitRate = 1000000; // 最小码率:1Mbps
VencSetParameter(pEncoder, VENC_IndexParamSetBitRateRange, &bitRateRange);
II. VBR优化启用 (VENC_IndexParamVbrOptEnable)
功能说明:启用VBR优化算法,提高变码率编码质量,优化码率分配
取值范围:
-
0:禁用VBR优化
-
1:启用VBR优化
用法示例:
unsigned int vbrOptEnable = 1; // 启用VBR优化
VencSetParameter(pEncoder, VENC_IndexParamVbrOptEnable, &vbrOptEnable);
8. 特殊功能配置
I. 强制I帧 (VENC_IndexParamForceKeyFrame)
功能说明:强制下一帧编码为I帧,用于场景切换或关键点标记
用法示例:
VencSetParameter(pEncoder, VENC_IndexParamForceKeyFrame, NULL);
II. 虚拟I帧 (VENC_IndexParamVirtualIFrame)
功能说明:启用虚拟I帧技术,提高随机访问性能,减少I帧数量
用法示例:
unsigned int virtualIFrame = 600; // 600个虚拟I帧
VencSetParameter(pEncoder, VENC_IndexParamVirtualIFrame, &virtualIFrame);
III. 填充CBR (VENC_IndexParamFillingCbr)
功能说明:启用CBR填充,确保恒定码率输出,适用于需要稳定码率的场景
取值范围:
-
0:禁用CBR填充
-
1:启用CBR填充
用法示例:
unsigned char fillingCbr = 1; // 启用CBR填充
VencSetParameter(pEncoder, VENC_IndexParamFillingCbr, &fillingCbr);
9. 文件描述符
I. VBV共享文件描述符 (VENC_IndexParamGetVbvShareFd)
功能说明:获取VBV缓冲区的共享文件描述符,用于跨进程数据共享
用法示例:
int vbvShareFd = -1;
VencGetParameter(pEncoder, VENC_IndexParamGetVbvShareFd, &vbvShareFd);
if (vbvShareFd != -1) {
printf("VBV共享文件描述符: %d\n", vbvShareFd);
// 使用共享文件描述符进行跨进程数据共享
} else {
printf("获取VBV共享文件描述符失败\n");
}
【注意事项】
pEncoder为指向编码器实例指针,indexType为参数类型标识符指定要设置的参数类别,paramData为参数数据指针需与indexType匹配,设置后立即生效影响后续编码操作。
VencFbmCreate
【目的】
创建帧缓冲管理器实例,用于管理编码器的输入缓冲区。
【语法】
FrameBufferManager* VencFbmCreate(int num, struct ScMemOpsS *memops, void *veOps, void *pVeOpsSelf);
【参数】
num: 缓冲区数量memops: 内存操作接口指针veOps: VE操作接口指针pVeOpsSelf: VE操作上下文指针
【返回值】
成功返回指向新创建帧缓冲管理器的指针,失败返回NULL。
【使用示例】
FrameBufferManager* pFbm = VencFbmCreate(8, memops, veOps, pVeOpsSelf);
if (pFbm == NULL) {
printf("创建帧缓冲管理器失败\n");
return -1;
}
【注意事项】
num为缓冲区数量(建议4-16),memops为内存操作接口指针,用于创建帧缓冲管理器实例,必须确保内存操作接口有效。
VencFbmDestroy
【目的】
销毁帧缓冲管理器实例并释放所有相关资源。
【语法】
void VencFbmDestroy(FrameBufferManager* fbm);
【参数】
fbm: 指向要销毁的帧缓冲管理器的指针
【返回值】
无
【使用示例】
VencFbmDestroy(pFbm);
pFbm = NULL;
【注意事项】
fbm为指向要销毁的帧缓冲管理器指针,用于销毁帧缓冲管理器并释放所有相关资源,销毁后不应再使用该管理器。
VencFbmAllocateBuffer
【目的】
分配帧缓冲区,为编码器提供输入缓冲区。
【语法】
int VencFbmAllocateBuffer(FrameBufferManager* fbm, VencAllocateBufferParam *buffer_param, VencInputBuffer* dst_inputBuf);
【参数】
fbm: 指向帧缓冲管理器的指针buffer_param: 指向缓冲区参数的指针dst_inputBuf: 指向目标输入缓冲区的指针
【返回值】
成功返回0,失败返回负值错误码。
【使用示例】
VencAllocateBufferParam bufferParam = {0};
bufferParam.nSize = 1920 * 1080 * 3/2;
bufferParam.nAlign = 32;
VencInputBuffer inputBuffer;
int ret = VencFbmAllocateBuffer(pFbm, &bufferParam, &inputBuffer);
if (ret != 0) {
printf("分配缓冲区失败\n");
return -1;
}
【注意事项】
fbm为帧缓冲管理器指针,buffer_param为缓冲区参数指针,用于分配帧缓冲区为编码器提供输入缓冲区,必须确保缓冲区参数有效。
BitstreamManager 函数文档
BitStreamManager 结构体
【目的】
BitStreamManager 结构体是编码器中用于管理输出比特流数据的核心数据结构,提供了缓冲区管理、数据同步和多帧处理功能。
【结构体定义】
typedef struct BitStreamManager
{
unsigned char bEncH264Nalu;
MUTEX_STRUCT mutex;
char* pStreamBuffer;
char* pStreamBufferPhyAddrEnd;
char* pStreamBufferPhyAddr;
int nStreamBufferSize;
int nWriteOffset;
int nValidDataSize;
BSListQ nBSListQ;
struct ScMemOpsS *memops;
void *veOps;
void *pVeopsSelf;
int bSetVbvBufEnable;
int buf_share_fd;
}BitStreamManager;
【字段说明】
bEncH264Nalu: 标识是否为H.264 NALU格式编码,用于控制输出数据格式mutex: 互斥锁,用于多线程环境下的数据同步保护pStreamBuffer: 指向比特流缓冲区的虚拟地址指针pStreamBufferPhyAddrEnd: 比特流缓冲区物理地址的结束位置pStreamBufferPhyAddr: 比特流缓冲区的物理地址起始位置nStreamBufferSize: 比特流缓冲区的总大小(字节)nWriteOffset: 当前写入位置在缓冲区中的偏移量nValidDataSize: 缓冲区中有效数据的大小nBSListQ: 比特流队列,用于管理多个帧的比特流信息memops: 内存操作接口指针,提供内存分配、释放等功能veOps: 视频引擎操作接口指针,提供硬件加速功能pVeopsSelf: 视频引擎操作接口的上下文指针bSetVbvBufEnable: 标识是否启用VBV(Video Buffering Verifier)缓冲区buf_share_fd: 缓冲区共享文件描述符,用于进程间共享缓冲区
【注意事项】
- 比特流管理器是编码器输出数据管理的核心组件,负责维护编码后的数据缓冲区
- 多线程环境下访问结构体时,应通过互斥锁mutex进行同步保护
- 物理地址字段主要用于硬件加速编码器直接访问内存
- VBV缓冲区启用与否会影响编码器的码率控制行为
- 缓冲区共享文件描述符用于多进程间的数据共享,提高系统效率
BitStreamCreate
【目的】
创建比特流管理器实例,用于管理编码器的输出比特流数据。
【语法】
BitStreamManager *BitStreamCreate(unsigned char bIsVbvNoCache, int nSetBufferEnable, int nBufferSize, struct ScMemOpsS *memops, void *veOps, void *pVeOpsSelf);
【参数】
bIsVbvNoCache: 是否为非缓存VBVnSetBufferEnable: 是否启用设置缓冲区nBufferSize: 缓冲区大小memops: 内存操作接口指针veOps: VE操作接口指针pVeOpsSelf: VE操作上下文指针
【返回值】
成功返回指向新创建比特流管理器的指针,失败返回NULL。
【使用示例】
BitStreamManager* pBsMgr = BitStreamCreate(0, 1, 1024*1024, memops, veOps, pVeOpsSelf);
if (pBsMgr == NULL) {
printf("创建比特流管理器失败\n");
return -1;
}
【注意事项】
bIsVbvNoCache用于控制VBV缓存模式,nBufferSize为缓冲区大小,用于创建比特流管理器实例,必须确保内存操作接口有效。
BitStreamDestroy
【目的】
销毁比特流管理器实例并释放所有相关资源。
【语法】
void BitStreamDestroy(BitStreamManager* handle);
【参数】
handle: 指向要销毁的比特流管理器的指针
【返回值】
无
【使用示例】
BitStreamDestroy(pBsMgr);
pBsMgr = NULL;
【注意事项】
handle为指向要销毁的比特流管理器指针,用于销毁比特流管理器并释放所有相关资源,销毁后不应再使用该管理器。
BitStreamAddOneBitstream
【目的】
添加一个比特流到管理器中。
【语法】
int BitStreamAddOneBitstream(BitStreamManager* pBsMgr, BitStreamInfo* pInfo);
【参数】
pBsMgr: 指向比特流管理器的指针pInfo: 指向比特流信息的指针
【返回值】
成功返回0,失败返回负值错误码
【使用示例】
BitStreamAddOneBitstream(pBsMgr, &bsInfo1);
【注意事项】
pBsMgr为指向比特流管理器指针,pInfo为指向比特流信息的指针,包含数据、长度、时间戳等信息,用于添加比特流段到管理器中。
BitStreamGetOneBitstream
【目的】
从管理器中获取一个比特流。
【语法】
int BitStreamGetOneBitstream(BitStreamManager* pBsMgr, BitStreamInfo* pInfo);
【参数】
pBsMgr: 指向比特流管理器的指针pInfo: 指向存储比特流信息的结构指针
【返回值】
成功返回0,失败返回负值错误码
【使用示例】
BitStreamGetOneBitstream(pBsMgr, &outputBsInfo);
【注意事项】
pBsMgr为指向比特流管理器指针,pInfo为指向存储比特流信息的结构指针,用于从管理器中获取一个比特流数据。
BitStreamGetOneBitstreamInfo
【目的】
获取特定比特流的信息。
【语法】
int BitStreamGetOneBitstreamInfo(BitStreamManager* pBsMgr, int nIndex, BitStreamInfo* pInfo);
【参数】
pBsMgr: 指向比特流管理器的指针nIndex: 比特流索引pInfo: 指向存储比特流信息的结构指针
【返回值】
成功返回0,失败返回负值错误码
【使用示例】
BitStreamGetOneBitstreamInfo(pBsMgr, 0, &firstBsInfo);
【注意事项】
pBsMgr为指向比特流管理器指针,nIndex为比特流索引从0开始,pInfo为指向存储比特流信息的结构指针,用于获取特定比特流的信息。
BitStreamGetUnReturnNum
【目的】
获取未归还的比特流数量。
【语法】
int BitStreamGetUnReturnNum(BitStreamManager* pBsMgr);
【参数】
pBsMgr: 指向比特流管理器的指针
【返回值】
返回未归还的比特流数量
【注意事项】
pBsMgr为指向比特流管理器指针,用于获取当前未归还的比特流数量,可用于检查缓冲区状态。
BitStreamGetUnReadNum
【目的】 获取未读取的比特流数量。
【语法】
int BitStreamGetUnReadNum(BitStreamManager* pBsMgr);
【参数】
pBsMgr: 指向比特流管理器的指针
【返回值】 返回未读取的比特流数量
【使用示例】
BitStreamGetUnReadNum(pBsMgr);
【注意事项】
pBsMgr为指向比特流管理器指针,返回值表示等待读取的比特流块数量,与BitStreamAddOneBitstream和BitStreamGetOneBitstream操作同步,0表示无未读取数据。
BitStreamReturnOneBitstream
【目的】
归还一个比特流。
【语法】
int BitStreamReturnOneBitstream(BitStreamManager* pBsMgr, int nIndex);
【参数】
pBsMgr: 指向比特流管理器的指针nIndex: 比特流索引
【返回值】
成功返回0,失败返回负值错误码
【使用示例】
BitStreamReturnOneBitstream(pBsMgr, 0);
【注意事项】
pBsMgr为指向比特流管理器指针,nIndex为比特流索引用于指定归还的数据块位置,归还操作必须与获取操作成对出现以防止内存泄漏。
BitStreamReset
【目的】
重置比特流管理器。
【语法】
int BitStreamReset(BitStreamManager* pBsMgr);
【参数】
pBsMgr: 指向比特流管理器的指针
【返回值】
成功返回0,失败返回负值错误码
【使用示例】
BitStreamReset(pBsMgr);
【注意事项】
pBsMgr为指向比特流管理器指针,重置操作会清除所有内部数据,包括已添加、已获取和未归还的数据,管理器恢复到初始状态但对象本身不被销毁。
BitStreamSkipBuf
【目的】
跳过指定数量的比特流缓冲区。
【语法】
int BitStreamSkipBuf(BitStreamManager* pBsMgr, int nSkipNum);
【参数】
pBsMgr: 指向比特流管理器的指针nSkipNum: 要跳过的缓冲区数量
【返回值】
成功返回0,失败返回负值错误码
【使用示例】
BitStreamSkipBuf(pBsMgr, 3);
【注意事项】
pBsMgr为指向比特流管理器指针,nSkipNum为要跳过的缓冲区数量,跳过操作会永久性地移除指定数量的最早数据,操作不可逆。
BitstreamUpdatePackInfo
【目的】
更新比特流包信息。
【语法】
int BitstreamUpdatePackInfo(BitStreamManager* pBsMgr, int nIndex, PackInfo* pPackInfo);
【参数】
pBsMgr: 指向比特流管理器的指针nIndex: 比特流索引pPackInfo: 指向包信息的指针
【返回值】
成功返回0,失败返回负值错误码
【使用示例】
BitstreamUpdatePackInfo(pBsMgr, 0, &packInfo);
【注意事项】
pBsMgr为指向比特流管理器指针,nIndex为要更新的比特流索引,pPackInfo为指向包信息的指针,更新操作会覆盖之前的包信息,需确保索引有效。
FrameBufferManager 函数文档
FrameBufferManager 结构体
【目的】
FrameBufferManager 结构体是编码器中用于管理输入帧缓冲区的核心数据结构,提供了缓冲区分配、管理和同步功能。
【结构体定义】
typedef struct FrameBufferManager
{
VencInputBuffer selfAllocateBufArry[MAX_SELF_ALLOCATE_FBM_BUF_NUM];
unsigned int selfAllocateBufValidNum;
InputBufferList inputbuffer_list;
unsigned int size_y;
unsigned int size_c;
struct ScMemOpsS *memops;
VeOpsS* veops;
void* pVeOpsSelf;
}FrameBufferManager;
【字段说明】
selfAllocateBufArry: 自分配的输入缓冲区数组,最大数量为MAX_SELF_ALLOCATE_FBM_BUF_NUM(8)selfAllocateBufValidNum: 当前有效的自分配缓冲区数量inputbuffer_list: 输入缓冲区链表,管理所有缓冲区的状态size_y: Y分量缓冲区大小size_c: C分量(UV)缓冲区大小memops: 内存操作接口指针,提供内存分配、释放等功能veops: 视频引擎操作接口指针,提供硬件加速功能pVeOpsSelf: 视频引擎操作接口的上下文指针
【注意事项】
- 帧缓冲管理器是编码器输入数据管理的核心组件,负责维护编码前的帧数据缓冲区
- 自分配缓冲区数组用于内部管理,提高缓冲区分配效率
- 输入缓冲区链表维护了所有缓冲区的状态,包括有效队列和空队列
- size_y和size_c字段用于表示YUV格式中Y分量和C分量的大小
- 多线程环境下访问结构体时,应通过互斥锁进行同步保护
VencFbmCreate
【目的】
创建帧缓冲管理器实例。
【语法】
FrameBufferManager* VencFbmCreate(int num, struct ScMemOpsS *memops, void *veOps, void *pVeOpsSelf);
【参数】
num: 缓冲区数量memops: 内存操作接口指针veOps: VE操作接口指针pVeOpsSelf: VE操作上下文指针
【返回值】
成功返回指向新创建帧缓冲管理器的指针,失败返回NULL
【使用示例】
FrameBufferManager* pFbm = VencFbmCreate(4, memops, veOps, pVeOpsSelf);
【注意事项】
num为缓冲区数量,memops为内存操作接口,veOps为视频引擎操作接口,创建后需调用VencFbmDestroy释放资源。
VencFbmDestroy
【目的】
销毁帧缓冲管理器实例并释放所有相关资源。
【语法】
void VencFbmDestroy(FrameBufferManager* fbm);
【参数】
fbm: 指向帧缓冲管理器的指针。
【返回值】
无
【需求】
帧缓冲管理器必须是有效的。
【注意事项】
此函数会释放所有与帧缓冲管理器相关的资源,调用后不应再使用该管理器。
VencFbmAllocateBuffer
【目的】
添加一个有效的帧缓冲区。
【语法】
int VencFbmAddValidBuffer(FrameBufferManager* pFbm, ValidFrameBuffer* pBuffer);
【参数】
pFbm: 指向帧缓冲管理器的指针pBuffer: 指向有效帧缓冲区的指针
【返回值】
成功返回0,失败返回负值错误码
【使用示例】
VencFbmAddValidBuffer(pFbm, pBuffer);
【注意事项】
pFbm为指向帧缓冲管理器的指针,pBuffer为指向有效帧缓冲区的指针,缓冲区信息会被复制到内部存储。
VencFbmRequestValidBuffer
【目的】
请求一个有效的帧缓冲区。
【语法】
int VencFbmRequestValidBuffer(FrameBufferManager* pFbm, ValidFrameBuffer* pBuffer);
【参数】
pFbm: 指向帧缓冲管理器的指针pBuffer: 指向存储帧缓冲区信息的结构指针
【返回值】
成功返回0,失败返回负值错误码
【使用示例】
VencFbmRequestValidBuffer(pFbm, pBuffer);
【注意事项】
pFbm为指向帧缓冲管理器的指针,pBuffer为指向存储帧缓冲区信息的结构指针,请求的缓冲区信息是副本。
VencFbmReturnValidBuffer
【目的】
归还一个有效的帧缓冲区。
【语法】
int VencFbmReturnValidBuffer(FrameBufferManager* pFbm, int nIndex);
【参数】
pFbm: 指向帧缓冲管理器的指针nIndex: 帧缓冲区索引
【返回值】
成功返回0,失败返回负值错误码
【使用示例】
VencFbmReturnValidBuffer(pFbm, 0);
【注意事项】
pFbm为指向帧缓冲管理器的指针,nIndex为帧缓冲区索引,索引必须在有效范围内。
VencFbmReset
【目的】
重置帧缓冲区管理器。
【语法】
int VencFbmReset(FrameBufferManager* pFbm);
【参数】
pFbm: 指向帧缓冲区管理器的指针
【返回值】
成功返回0,失败返回负值错误码
【使用示例】
VencFbmReset(pFbm);
【注意事项】
pFbm为指向帧缓冲区管理器的指针,重置操作会清除所有内部状态,将管理器恢复到初始状态。
VencFbmGetValidBufferNum
【目的】
获取有效帧缓冲区的数量。
【语法】
int VencFbmGetValidBufferNum(FrameBufferManager* pFbm);
【参数】
pFbm: 指向帧缓冲区管理器的指针
【返回值】
返回有效帧缓冲区的数量
【使用示例】
int validCount = VencFbmGetValidBufferNum(pFbm);
【注意事项】
pFbm为指向帧缓冲区管理器的指针,返回值表示当前有效的帧缓冲区数量,可能会动态变化。
QueueFrameBuffer
【目的】
将帧缓冲区加入队列。
【语法】
int QueueFrameBuffer(FrameBufferManager* pFbm, FrameBufferNode* pNode);
【参数】
pFbm: 指向帧缓冲区管理器的指针pNode: 指向帧缓冲区节点的指针
【返回值】
成功返回0,失败返回负值错误码
【使用示例】
QueueFrameBuffer(pFbm, pNode);
【注意事项】
pFbm为指向帧缓冲区管理器的指针,pNode为指向帧缓冲区节点的指针,节点信息会被复制到内部队列。