SDK AI 辅助开发
本文档介绍如何使用 AI Agent 辅助工具进行 Tina Linux SDK 开发、配置和问题排查。
核心能力概览
V861 SDK 部署了完整的 AI 辅助开发能力,远超传统的问答式 AI 工具:
- 丰富的 Skills 知识库:涵盖 SDK 构建、设备配置、BSP 驱动、RTOS、多媒体等全栈技术领域
- 方便的 MCP 配置服务:支持多种 AI Agent(Claude Code、Cursor、Cline 等)快速接入
- quick_config 配置联动:AI 可直接调用 MCP 工具执行工具链切换、架构切换等配置操作
- 强大的配置执行能力:支持内核配置、设备树修改、板级配置、环境变量管理等大量配置操作
SDK AI 联动模块架构:
┌────────────────────────────────────────────────────────────────────┐
│ AI Agent Layer │
│ Claude Code │ Cursor │ Cline │ MCP Compatible Agents │
└───────────────────────────────┬────────────────────────────────────┘
│ MCP Protocol / AGENT.md
┌───────────────────────────────┴────────────────────────────────────┐
│ SDK AI Integration Layer │
│ ┌─────────────────────────┐ ┌─────────────────────────────────┐ │
│ │ Skills Knowledge Base │ │ MCP Tools Suite │ │
│ │ - SDK Build Skills │ │ - SDK MCP Config Tool │ │
│ │ - Device Config │ │ - File Operations │ │
│ │ - BSP Driver Skills │ │ - Shell Execution │ │
│ │ - RTOS/MPP Skills │ │ - Code Search │ │
│ │ - Other Skills │ │ - SDK info MCP Server │ │
│ └─────────────────────────┘ └─────────────────────────────────┘ │
└───────────────────────────────┬────────────────────────────────────┘
│
┌───────────────────────────────┴────────────────────────────────────┐
│ SDK Configuration Layer │
│ Kernel Config │ Device Tree │ U-Boot │ BoardConfig │ OpenWRT │
└───────────────────────────────┬────────────────────────────────────┘
│
┌───────────────────────────────┴────────────────────────────────────┐
│ Build & Output Layer │
│ Kernel Image │ Rootfs │ Firmware Image │
└────────────────────────────────────────────────────────────────────┘
支持的 AI Agent
| Agent | 说明 | 特点 |
|---|---|---|
| Claude Code | Anthropic 官方 CLI Agent | 原生支持 Skills,MCP |
| OpenCode | 开源 CLI Agent | 原生支持 Skills,MCP |
| Codex | OpenAI 官方 CLI Agent | 原生支持 Skills,MCP |
| Cursor | AI 代码编辑器 | 支持 MCP 协议,可接入 Skills |
| Cline | VSCode AI 插件 | 支持自定义指令,兼容 Skills |
| 其他 MCP 兼容 Agent | 支持 MCP 协议的任意 Agent | 可通过 MCP Server 接入 |
AI 开发能力矩阵
| 能力类别 | 具体功能 | 说明 |
|---|---|---|
| 代码编译 | 执行构建命令 | AI 可以直接执行 m -j8、mkernel、pack 等编译命令 |
| 代码编写 | 编写/修改代码 | AI 可以直接编辑源文件、设备树、配置文件等 |
| 应用设计 | 设计应用架构 | 帮助设计应用程序结构、驱动框架、系统集成方案 |
| 问题诊断 | 分析日志/崩溃 | 智能分析串口日志、kernel panic、coredump 等 |
| 配置管理 | 修改配置文件 | 自动修改 Makefile、Kconfig、设备树等 |
Skills 知识库
SDK 内置了丰富的 Skills 知识库,为 AI Agent 提供专业的技术支撑:
| 类别 | 覆盖领域 |
|---|---|
| SDK 构建 | 编译命令、快速配置、环境管理 |
| 设备配置 | 设备树、GPIO、引脚复用 |
| BSP 驱动 | UART、SPI、I2C、网络、存储、多媒体 |
| RTOS | Melis 调试、驱动移植、编译系统 |
| 多媒体 | MPP 框架、摄像头、编码器 |
| ······ | ······ |
关键特性:
- 可执行命令:AI 不仅能给出建议,还能直接执行 shell 命令、编译代码
- 文件操作:支持读取、创建、编辑项目中的任意文件
- 多文件协作:可以同时操作多个相关文件,保持代码一致性
- 上下文理解:理解整个 SDK 的目录结构、构建系统、代码风格
- Skills 增强:通过 Skills 知识库,AI 获得专业的 SDK 开发能力
什么是 AI SDK
Tina Linux AI SDK 是将 AI 辅助开发能力集成到 Tina Linux SDK 中的完整解决方案。通过 AI Agent 工具,开发者可以:
- 智能问答:询问 SDK 使用方法、配置选项、驱动接口等
- 代码分析:理解复杂驱动代码、内核配置、设备树结构
- 问题诊断:分析串口日志、崩溃信息、编译错误
- 配置指导:获取设备树、内核配置、板级配置的正确写法
- 代码生成:自动生成驱动代码、应用框架、配置文件
系统架构
Tina Linux SDK
├── AGENT.md # SDK 全局指令(构建命令、目录结构等)
├── skills/ # Skills 技能文档库(支持多 Agent)
│ ├── sdk/ # SDK 构建和配置技能
│ ├── device/ # 芯片和设备配置技能
│ ├── bsp/ # BSP 驱动开发技能
│ ├── melis/ # Melis RTOS 技能
│ ├── eyesee-mpp/ # 多媒体中间件技能
│ └── docs/ # 文档工具技能
├── .cursor/ # Cursor 配置目录(可选)
├── .vscode/ # VSCode/Cline 配置(可选)
└── docs/ # 文档目录
.... # SDK 其余文件
工作原理
- AGENT.md 提供全局上下文,定义 SDK 基本命令和结构
- Skills 系统 提供专项技术文档,AI Agent 根据指令检索相关技能
- Memory 系统 保存用户偏好和历史经验,持续学习改进
- 多 Agent 支持 通过标准化接口(AGENT.md、MCP)支持多种 AI Agent
Skills 系统介绍
目录结构
skills/
├── README.md # Skills 主索引相关 SKills
├── sdk/ # SDK 构建与配置相关 SKills
├── device/ # 芯片设备配置相关 SKills
│ └── v861/
│ ├── dts/ # 设备树配置相关 SKills
│ ├── gpio/ # GPIO 引脚配置相关 SKills
│ ... # 其他设备相关 Skills
├── bsp/ # BSP 驱动开发相关 SKills
│ ├── bsp_intro/ # BSP 介绍相关 SKills
│ ... # 其他 BSP 相关 Skills
├── melis/ # Melis RTOS 相关 SKills
└── eyesee-mpp/ # 多媒体中间件相关 SKills
└── middleware/ # MPP 组件技能相关 SKills
SKILL.md 文件格式
每个 Skill 使用 YAML front matter 格式:
---
name: skill-name
description: 简短描述该技能的用途和使用场景
---
# 技能标题
详细的技术文档内容...
## 源码位置
## 配置方法
## 使用示例
## 调试方法
## 相关文件
关键元素:
name: 技能唯一标识符description: 用于 AI 自动匹配用户问题
Skills 使用方式
为了兼容多个 AI 平台,默认提供的Skills 不会自动被触发。SKILL.md 文件是普通 Markdown 文档,在使用的时候 Agent 不会自动扫描或匹配它们。要让 Agent 使用 Skills,需要在 AGENT.md 中添加明确的检索指令。
配置方法
在 AGENT.md 中添加 Skills 检索指令:
## Skills System
**IMPORTANT: You MUST proactively search and read relevant skills when handling user requests.**
········
为什么需要这样配置?
- 没有自动索引机制 - YAML front matter 中的
description只是文档内容,不会被自动匹配 - 需要显式指令 - Agent 必须被告知去搜索 skills 目录
- 上下文限制 - 无法将所有 skills 加载到上下文中,需要按需检索
检索流程
用户问题: "如何配置 UART1?"
↓
Agent 根据 AGENT.md 指令执行:
↓
Glob skills/**/SKILL.md (找到所有 skills)
↓
Grep "uart" skills/ (搜索关键词)
↓
Read skills/bsp/drivers/uart/SKILL.md (读取相关 skill)
↓
基于 skill 内容回答用户
基本使用流程
1. 询问构建相关问题
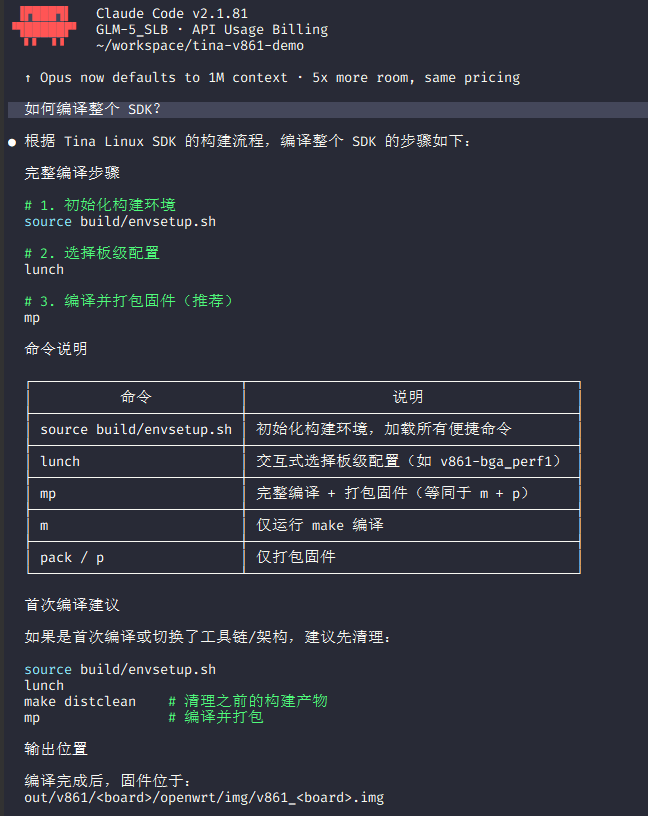
用户: 如何编译整个 SDK?
2. 询问驱动配置问题
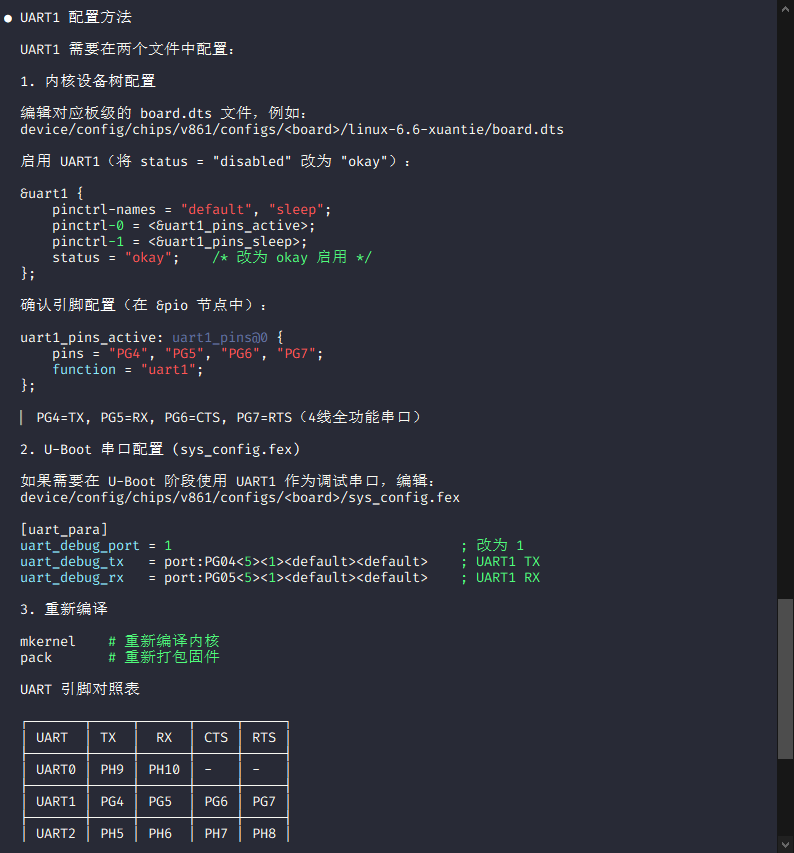
用户: 如何配置 UART1 串口?
3. 询问问题诊断
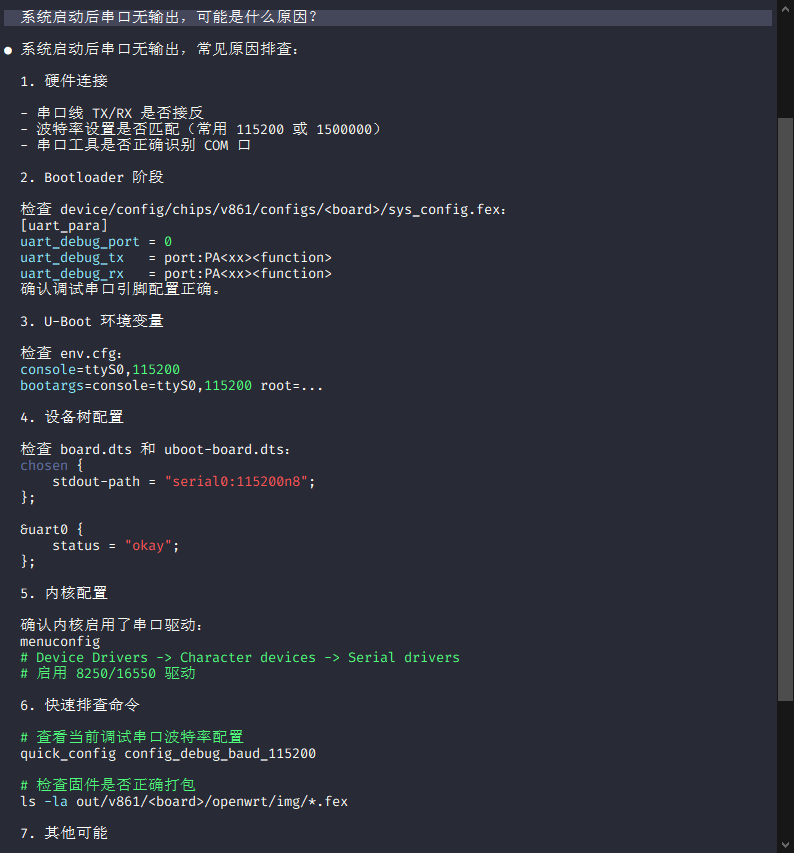
用户: 系统启动后串口无输出,可能是什么原因?
常用 Skills 快速参考
| 场景 | 推荐 Skill | 典型问题示例 |
|---|---|---|
| 编译 SDK | build_sdk | "如何编译内核?" "mkernel 做什么?" |
| 切换配置 | quick_config | "如何切换 glibc 工具链?" |
| 设备树 | dts | "如何添加 I2C 设备?" |
| 引脚配置 | gpio | "PE8 可以用于哪些功能?" |
| 串口驱动 | uart | "如何启用 DMA?" |
| 以太网 | gmac | "如何配置 RMII 模式?" |
| 摄像头 | vin-overview | "如何添加新摄像头?" |
| 崩溃分析 | coredump_analysis | "程序崩溃如何分析?" |
| RTOS 调试 | melis-debug | "RTOS 启动失败怎么办?" |
开发场景指南
SDK 构建场景
场景 1:首次构建 SDK
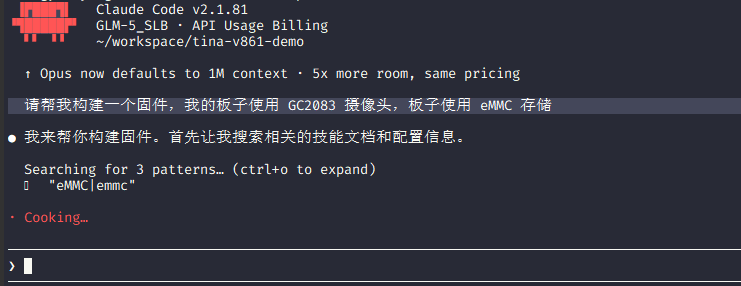
请帮我构建一个固件,我的板子使用 GC2083 摄像头,板子使用 eMMC 存储
AI 开始执行操作,查看相关配置和技能
然后 AI 会提问,我们使用单个摄像头
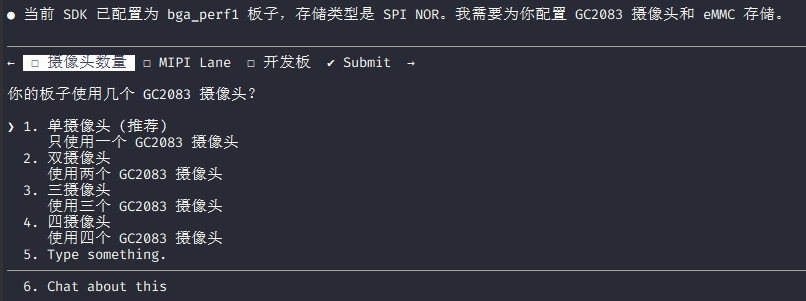
摄像头是 2lane 的摄像头,选择 2lane
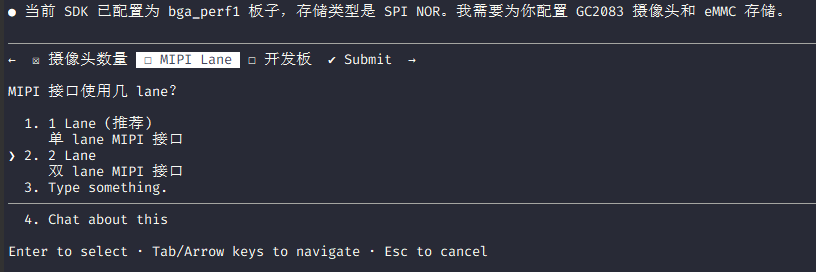
选择开发板,我们是 bga_perf1 开发板
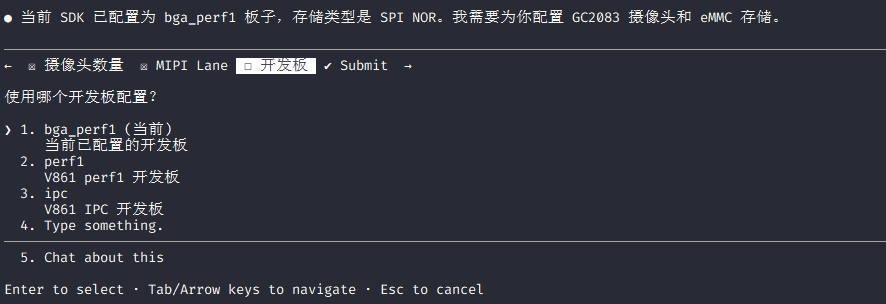
询问完成,提交
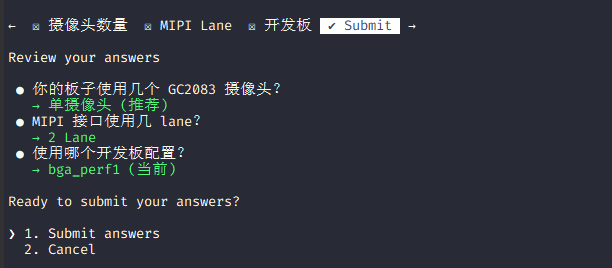
然后 AI 会执行编译操作,等待输出固件即可,如果出现报错 AI 会自行解决,也可以人工干预解决。
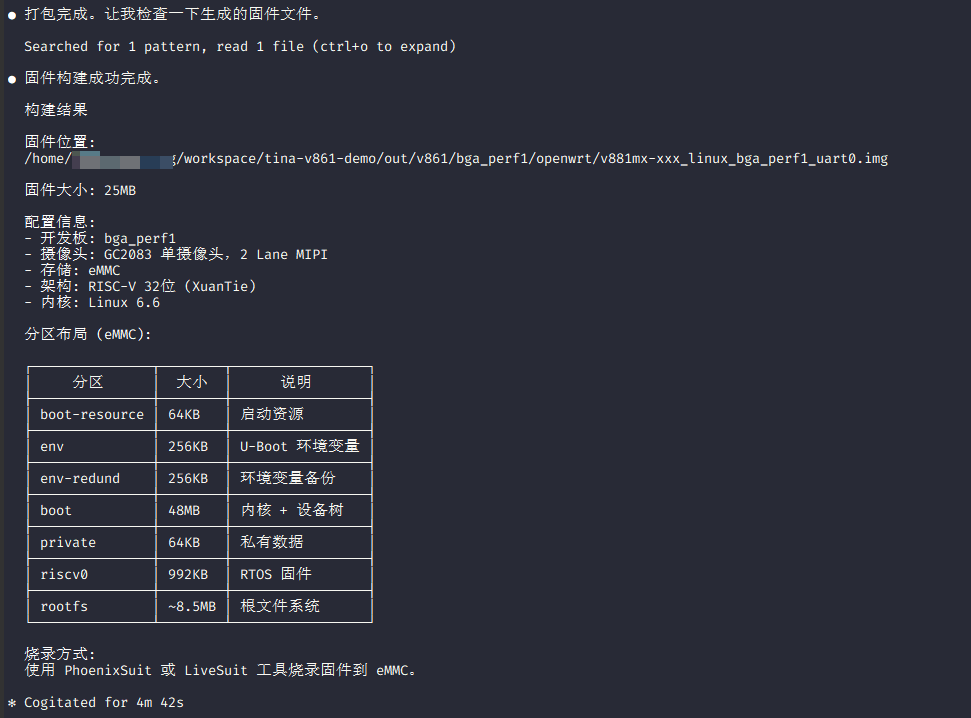
AI 编译完成
场景 2:只编译内核
用户: 修改了设备树,如何只重新编译内核?
Agent: 使用 mkernel 命令:
mkernel # 编译内核和设备树
pack # 重新打包固件
导航命令:
ck # 进入内核源码目录
cdts # 进入设备树目录
ckout # 进入内核输出目录
场景 3:切换工具链
用户: 如何从 musl 切换到 glibc?
Agent: 使用 quick_config 工具:
# 注意:切换前需要清理
make distclean
# 切换到 glibc
quick_config glibc_toolchain
# 重新编译
m -j$(nproc)
pack
驱动开发场景
场景 1:添加新的 I2C 设备
用户: 如何在 I2C0 上添加一个温度传感器 LM75?
Agent: 根据 twi 和 dts skill,步骤如下:
1. 在 board.dts 的 &twi0 节点下添加子节点:
&twi0 {
status = "okay";
lm75: lm75@48 {
compatible = "national,lm75";
reg = <0x48>;
};
};
2. 确保内核启用 LM75 驱动:
make menuconfig
# 路径: Device Drivers -> Hardware Monitoring -> LM75
3. 重新编译:
mkernel
pack
场景 2:配置 SPI Flash
用户: 如何启用 SPI NOR Flash 支持?
Agent: 根据 spi 和 mtd skill:
1. 检查设备树中 &spif 节点:
&spif {
clock-frequency = <100000000>;
status = "okay";
spif-nor {
compatible = "jedec,spi-nor";
status = "okay";
};
};
2. 内核配置启用 MTD:
make menuconfig
# 启用:
# - MTD support
# - SPI NOR device support
3. 用户空间访问:
# 查看 MTD 分区
cat /proc/mtd
# 擦除分区
flash_erase /dev/mtd0 0 0
设备树配置场景
场景 1:修改 CPU 频率
用户: 如何启用 1.368GHz 的 CPU 频率?
Agent: 根据 dts skill,修改 OPP 表:
在 board.dts 中覆盖 OPP 状态:
&cluster0_opp_table {
opp@1368000000 {
status = "okay"; /* 默认为 disabled */
};
};
重新编译设备树:
mkernel
pack
场景 2:配置显示屏
用户: 如何配置 RGB 显示屏?
Agent: 根据 dts skill:
1. 启用显示相关节点:
&vo0 {
status = "okay";
};
&rgb0 {
status = "okay";
pinctrl-0 = <&rgb24_PD_pins_default>;
};
2. 配置时序(在 panel 节点中):
panel@0 {
compatible = "simple-panel";
power-supply = <®_lcd_power>;
display-timings {
native-mode = <&timing0>;
timing0: timing0 {
clock-frequency = <30000000>;
hactive = <800>;
vactive = <480>;
hfront-porch = <40>;
hback-porch = <40>;
hsync-len = <48>;
vfront-porch = <13>;
vback-porch = <29>;
vsync-len = <3>;
};
};
};
多媒体开发场景
场景 1:配置摄像头
用户: 如何添加 GC4663 摄像头?
Agent: 根据 vin-sensor-porting skill:
1. 在设备树中添加传感器配置:
&vind0 {
sensor0: sensor@5812000 {
sensor0_mname = "gc4663_mipi";
sensor0_twi_addr = <0x52>;
sensor0_twi_id = <0>;
sensor0_reset = <&pio PA 18 GPIO_ACTIVE_LOW>;
status = "okay";
};
};
2. 配置 MIPI 接口:
&mipi0 {
status = "okay";
};
3. 确保驱动已启用:
make menuconfig
# Allwinner BSP -> VIN Drivers -> GC4663 sensor
问题诊断与调试
串口日志分析流程
当遇到启动或运行问题时,提供串口日志可帮助快速定位问题。
提供信息清单
请提供以下信息以便分析:
1. 【问题描述】
- 具体现象是什么?
- 是偶发还是必现?
- 有没有错误提示?
2. 【串口日志】
- 完整的启动日志(从上电开始)
- 出错前后的日志片段
3. 【环境信息】
- SDK 版本
- 板型配置(lunch 选择的配置)
- 是否有修改过代码/配置
4. 【复现步骤】
- 如何复现问题?
日志分析示例
示例 1:U-Boot 启动失败
用户提供日志:
[00.000] U-Boot 2023.04 (Mar 01 2024 - 10:00:00 +0800)
[00.100] DRAM: 128 MiB
[00.200] Loading Environment from SPI Flash...
[00.300] *** Warning - bad CRC, using default environment
[00.400] Hit any key to stop autoboot: 0
[00.500] Failed to load kernel
Agent 分析:
根据日志分析,问题在于:
1. "bad CRC" 表示 U-Boot 环境变量损坏
2. "Failed to load kernel" 表示内核加载失败
可能原因:
1. 内核镜像损坏或不存在
2. 启动参数配置错误
3. 存储介质问题
建议操作:
1. 进入 U-Boot 命令行(启动时按任意键)
2. 检查内核加载命令:
=> printenv bootcmd
3. 手动加载内核测试:
=> sf probe
=> sf read 0x40000000 0x100000 0x600000
=> bootm 0x40000000
示例 2:内核启动失败
用户提供日志:
[ 0.000000] Linux version 6.6.0-xuantie
[ 0.500000] Cannot find devtmpfs
[ 0.600000] Kernel panic - not syncing: VFS: Unable to mount root fs
Agent 分析:
根据日志,内核无法挂载根文件系统。
可能原因:
1. 根文件系统类型未配置正确
2. 存储设备未识别
3. 内核缺少必要的驱动
检查内核配置:
make menuconfig
# 确保启用:
# - Device Drivers -> Block devices -> Loopback device
# - File systems -> Pseudo filesystems -> /proc, /sys, /devtmpfs
检查启动参数:
cat device/config/chips/v861/configs/<board>/env.cfg
# 查看 root= 参数是否正确
Coredump 分析
当应用程序崩溃时,可以使用 coredump 分析崩溃原因。
步骤 1:在设备上启用 coredump
# 启用 core dump
ulimit -c unlimited
# 设置 core 文件位置
echo "/tmp/core.%e.%p" > /proc/sys/kernel/core_pattern
# 运行程序,崩溃后会在 /tmp 生成 core 文件
./your_program
步骤 2:使用 GDB 分析
# 找到 GDB 工具链
find prebuilt -name "*-gdb"
# 设置变量
COREDUMP=/tmp/core.your_program.1234
APP=/path/to/your_program
ROOTFS=out/v861/your_board/openwrt/staging_dir/target/root-v861-*
# 使用 GDB 分析
riscv32-unknown-linux-musl-gdb $APP \
-ex "set sysroot $ROOTFS" \
-ex "core-file $COREDUMP" \
-ex "bt full"
示例分析
用户提供:
程序 vi2venc 崩溃,coredump 已生成。
Agent 分析:
根据 coredump_analysis skill,使用以下命令分析:
# 找到工具链
GDB=$(find prebuilt -name "riscv32-unknown-linux-musl-gdb" | head -1)
# 设置路径
APP=out/v861/ipc/openwrt/bin/vi2venc
COREDUMP=/tmp/core.vi2venc.1234
ROOTFS=out/v861/ipc/openwrt/staging_dir/target/root-v861-ipc
# 分析
$GDB $APP -ex "set sysroot $ROOTFS" -ex "core-file $COREDUMP" -ex "bt"
# 输出示例:
#0 0x40123456 in func_a (ptr=0x0) at src/module.c:100
#1 0x40123789 in func_b () at src/main.c:50
#2 0x40123abc in main () at src/main.c:30
问题定位:func_a 中访问了空指针 (ptr=0x0)
常见问题排查
启动类问题
| 现象 | 可能原因 | 排查方法 |
|---|---|---|
| 无任何输出 | 电源/串口问题 | 检查电源、串口线连接 |
| U-Boot 无输出 | SPL 未运行 | 检查 boot0 是否烧录正确 |
| 内核无输出 | 控制台配置错误 | 检查 console 参数、stdout-path |
| 挂载根文件系统失败 | 存储驱动未启用 | 检查内核配置、存储设备识别 |
驱动类问题
| 现象 | 可能原因 | 排查方法 |
|---|---|---|
| 设备节点不存在 | 驱动未加载/未启用 | 检查设备树 status、内核配置 |
| 通信失败 | 引脚配置错误 | 检查 pinctrl、引脚冲突 |
| 中断不触发 | 中断配置错误 | 检查 interrupts 属性 |
| DMA 失败 | 内存/通道配置 | 检查 dma 属性、内存保留区 |
进阶使用
添加自定义 Skills
如果 SDK 中没有覆盖你的需求,可以添加自定义 Skill。
步骤 1:创建 Skill 目录
# 在适当位置创建目录
mkdir -p skills/custom/my_driver
步骤 2:编写 SKILL.md
---
name: my_driver
description: 自定义驱动开发指南。用于 XXX 驱动的开发和调试。
---
# XXX 驱动开发指南
## 概述
...
## 源码位置
...
## 配置方法
...
## 使用示例
...
步骤 3:更新索引
在对应模块的 README.md 中添加新 Skill 条目。
配合 AGENT.md 使用
可以在子目录中创建 AGENT.md 来提供特定上下文:
bsp/drivers/uart/AGENT.md # UART 驱动特定指令
device/config/chips/v861/AGENT.md # V861 特定指令
最佳实践
提问技巧
好的提问
用户: 我想在 V861 上启用 UART2,波特率 1500000,使用 DMA。
请问如何配置设备树?
Agent: 根据 uart skill,配置步骤如下:
1. 启用 UART2 节点并配置 DMA:
&uart2 {
pinctrl-names = "default";
pinctrl-0 = <&uart2_pins>;
dmas = <&dma 16>, <&dma 16>;
dma-names = "tx", "rx";
status = "okay";
};
2. 配置引脚:
uart2_pins: uart2-pins {
pins = "PA8", "PA9";
function = "uart2";
};
3. 设置波特率(在 chosen 节点或内核参数):
console=ttyS2,1500000
不好的提问
用户: 串口不工作怎么办?
Agent: 请提供更多信息:
1. 是哪个串口?
2. 具体现象是什么?(无输出?乱码?)
3. 提供相关日志
4. 当前的配置是什么?
信息收集清单
在提问前,准备好以下信息:
- SDK 版本和板型配置
- 问题描述和复现步骤
- 相关串口日志
- 已尝试的解决方法
- 修改过的配置文件
常见问题速查
| 问题 | 参考 Skill | 快速答案 |
|---|---|---|
| 如何编译 SDK? | build_sdk | source build/envsetup.sh && lunch && m -j$(nproc) && pack |
| 如何只编译内核? | build_sdk | mkernel |
| 如何切换工具链? | quick_config | quick_config glibc_toolchain |
| 如何配置引脚? | gpio, dts | 查看 v861-pinouts.csv |
| 如何添加 I2C 设备? | twi, dts | 在 &twi 节点添加子节点 |
| 如何分析崩溃? | coredump_analysis | 使用 GDB 分析 core 文件 |
| RTOS 如何调试? | melis-debug | 根据问题类型调度专项 skill |
模块联动架构
┌─────────────────────────────────────────────────────────────────────────────┐
│ AI Agent Layer │
│ ┌──────────────┐ ┌──────────────┐ ┌──────────────┐ ┌──────────────────┐ │
│ │ Claude Code │ │ Cursor │ │ Cline │ │ MCP Compatible │ │
│ │ (CLI) │ │ (Editor) │ │ (VSCode) │ │ Agents │ │
│ └──────┬───────┘ └──────┬───────┘ └──────┬───────┘ └────────┬─────────┘ │
└─────────┼─────────────────┼─────────────────┼───────────────────┼───────────┘
│ │ │ │
└─────────────────┴─────────────────┴───────────────────┘
│
MCP Protocol / AGENT.md
│
┌───────────────────────────────────┴───────────────────────────────────────────┐
│ SDK AI Integration Layer │
│ │
│ ┌─────────────────────────────┐ ┌─────────────────────────────────────┐ │
│ │ Skills Knowledge Base │ │ MCP Tools Suite │ │
│ │ ┌───────────────────────┐ │ │ ┌───────────────────────────────┐ │ │
│ │ │ SDK Build Skills │ │ │ │ quick_config MCP Tool │ │ │
│ │ │ - build_sdk │ │ │ │ - Toolchain switch │ │ │
│ │ │ - quick_config │ │ │ │ - Architecture switch │ │ │
│ │ │ - coredump_analysis │ │ │ │ - Storage medium change │ │ │
│ │ └───────────────────────┘ │ │ │ - Debug config toggle │ │ │
│ │ ┌───────────────────────┐ │ │ │ - Sensor configuration │ │ │
│ │ │ Device Config Skills │ │ │ └───────────────────────────────┘ │ │
│ │ │ - dts │ │ │ ┌───────────────────────────────┐ │ │
│ │ │ - gpio │ │ │ │ File Operations MCP Tool │ │ │
│ │ │ - pinmux │ │ │ │ - Read/Write/Edit files │ │ │
│ │ └───────────────────────┘ │ │ │ - Search code patterns │ │ │
│ │ ┌───────────────────────┐ │ │ └───────────────────────────────┘ │ │
│ │ │ BSP Driver Skills │ │ │ ┌───────────────────────────────┐ │ │
│ │ │ - uart/spi/twi │ │ │ │ Shell Execution MCP Tool │ │ │
│ │ │ - mmc/gmac/sound │ │ │ │ - Build commands (m, pack) │ │ │
│ │ │ - vin/vout │ │ │ │ - Debug tools │ │ │
│ │ └───────────────────────┘ │ │ └───────────────────────────────┘ │ │
│ │ ┌───────────────────────┐ │ │ │ │
│ │ │ RTOS/MPP Skills │ │ └─────────────────────────────────────┘ │
│ │ │ - melis-debug │ │ │
│ │ │ - middleware │ │ │
│ │ └───────────────────────┘ │ │
│ └─────────────────────────────┘ │
└───────────────────────────────────────────────────────────────────────────────┘
│
┌───────────────────────────────────┴───────────────────────────────────────────┐
│ SDK Configuration Layer │
│ │
│ ┌─────────────────┐ ┌─────────────────┐ ┌─────────────────┐ │
│ │ Kernel Config │ │ Device Tree │ │ U-Boot Config │ │
│ │ - defconfig │ │ - board.dts │ │ - defconfig │ │
│ │ - fragments │ │ - pinctrl │ │ - env.cfg │ │
│ └────────┬────────┘ └────────┬────────┘ └────────┬────────┘ │
│ │ │ │ │
│ └────────────────────┴────────────────────┘ │
│ │ │
│ ┌─────────────────┐ ┌────────┴────────┐ ┌─────────────────┐ │
│ │ BoardConfig.mk │ │ sys_config │ │ Partition Table │ │
│ │ - Toolchain │ │ - sys_config │ │ - sys_partition│ │
│ │ - Architecture │ │ - pinmux │ │ - boot_package │ │
│ └─────────────────┘ └─────────────────┘ └─────────────────┘ │
│ │
│ ┌─────────────────┐ ┌─────────────────┐ ┌─────────────────┐ │
│ │ OpenWRT Config │ │ RTOS Config │ │ Boot0 Config │ │
│ │ - packages │ │ - defconfig │ │ - common.mk │ │
│ │ - defconfig │ │ - sys_config │ │ - boot0.cfg │ │
│ └─────────────────┘ └─────────────────┘ └─────────────────┘ │
└───────────────────────────────────────────────────────────────────────────────┘
│
┌───────────────────────────────────┴───────────────────────────────────────────┐
│ Build & Output Layer │
│ │
│ ┌─────────────────┐ ┌─────────────────┐ ┌─────────────────┐ │
│ │ Kernel Image │ │ Rootfs Image │ │ Boot Firmware │ │
│ │ - vmlinux │ │ - rootfs.img │ │ - boot0.bin │ │
│ │ - zImage │ │ - packages │ │ - u-boot.bin │ │
│ └─────────────────┘ └─────────────────┘ └─────────────────┘ │
│ │
│ ┌─────────────────────────────┐ │
│ │ Final Firmware Image │ │
│ │ (img for flashing) │ │
│ └─────────────────────────────┘ │
└───────────────────────────────────────────────────────────────────────────────┘
quick_config 配置联动
quick_config 工具通过 MCP 协议与 AI Agent 集成,实现一键配置能力:
| 配置类别 | 支持的配置项 | 影响范围 |
|---|---|---|
| 工具链切换 | musl_toolchain / glibc_toolchain | BoardConfig.mk、编译环境 |
| 架构切换 | RV32I / RV64I / RV64ILP32 | 内核配置、工具链、OpenSBI |
| 存储介质 | SPI NOR / SPI NAND / eMMC | 分区表、U-Boot、内核驱动 |
| 调试配置 | UART 打印、kallsyms、debugfs | Boot0、U-Boot、内核 |
| 摄像头配置 | 单目/双目/多目传感器 | 设备树、VIN 驱动 |
| 内存优化 | 内存布局、预留区域 | 设备树、内核配置、RTOS |
| 产品模式 | IPC/CDR/Tuya 演示 | MPP、OpenWRT 包 |