SDK 固件编译
本章节主要介绍获取V821 SDK后,如何编译SDK,以及编译SDK中的单个组件。如果您已拿到V821的开发板,想快速进入Demo演示和体验,可先跳过本章节,进入到 SDK固件烧录章节。
SDK 整体编译
检查SDK文件
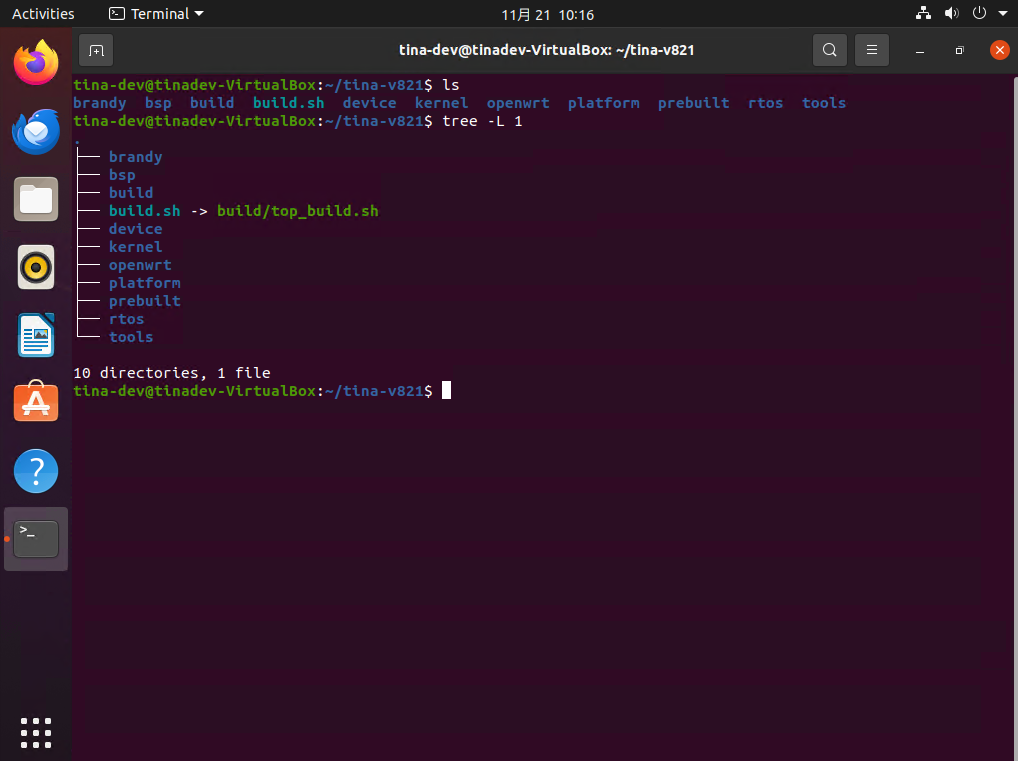
下载完成后的 SDK 应有如下文件,可以使用 ls 或者 tree -L 1 命令检查
.
├── brandy
├── bsp
├── build
├── build.sh -> build/top_build.sh
├── device
├── kernel
├── openwrt
├── platform
├── prebuilt
├── rtos
└── tools
10 directories, 1 file
初始化环境
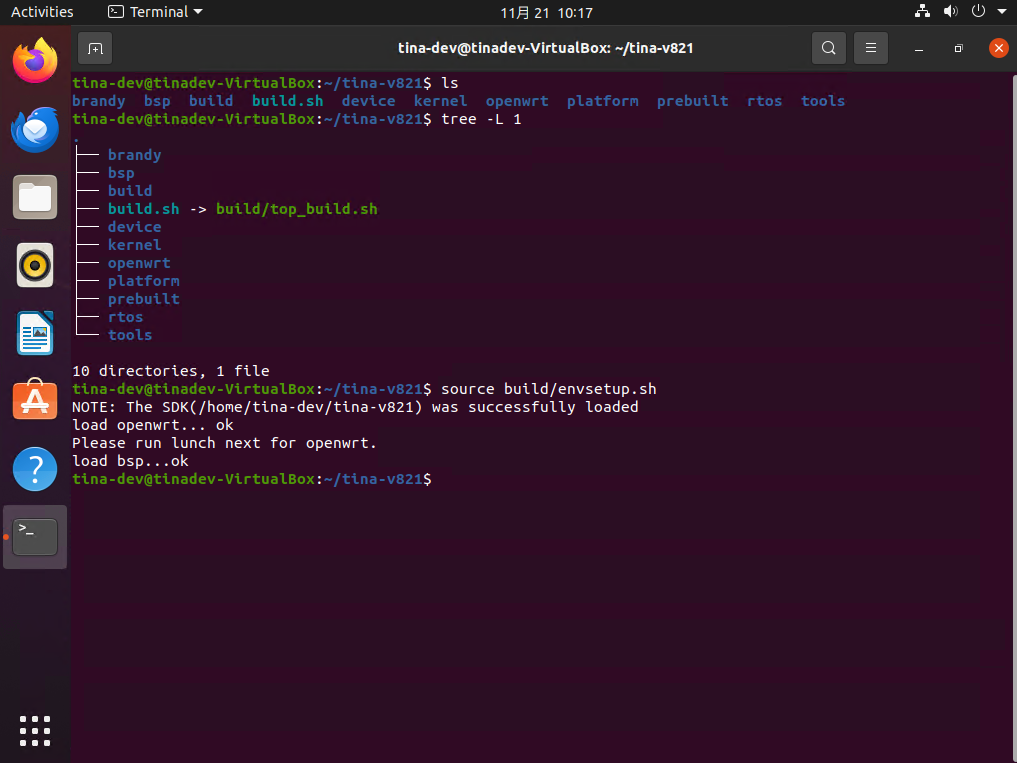
使用命令 source build/envsetup.sh 初始化SDK编译环境,初始化后便可以使用快捷指令与SDK相关指令。
选择方案
首先需要明确方案与开发板的关系:
| 开发板名称 | 丝印名称 | 方案 | 方案描述 |
|---|---|---|---|
| 全志 PERF2B 开发板 | V821M2-WXX_PER2_B_4L | v821-perf2b-tina | PERF2B 开发板配套板级,支持验证多目输入,支持 PMC,支持低功耗,电池,带屏方案 |
| 全志 PERF2B 开发板 | V821M2-WXX_PER2_B_4L | v821-perf2b_fastboot-tina | PERF2B 开发板配套快起板级,支持多目输入,支持 PMC,支持低功耗,电池,带屏方案 |
| 全志 PERF2 开发板 | V821M2-WXX_PER2_4L | v821-perf2-tina | PERF2 开发板配套板级,支持验证多目输入 |
| 全志 PERF2 开发板 | V821M2-WXX_PER2_4L | v821-perf2_fastboot-tina | PERF2 开发板配套快起板级,支持多目输入验证 |
| 全志 IPC 原型机开发板 | V821M2-WXX_PRO_MONOCULAR_IPC_2L | v821-ipc-tina | IPC 板级配套最小化配置板级方案,支持 8M Flash,原型机配置 |
| 百问网 AvaotaF1 核心板 | Avaota F1 | v821-100ask_avaota_f1-tina | 适配 100ASK Avaota F1 的方案板级,常电方案,基于 PERF2 板级差异化适配 |
- SDK 1.3
- SDK 1.0~SDK 1.2
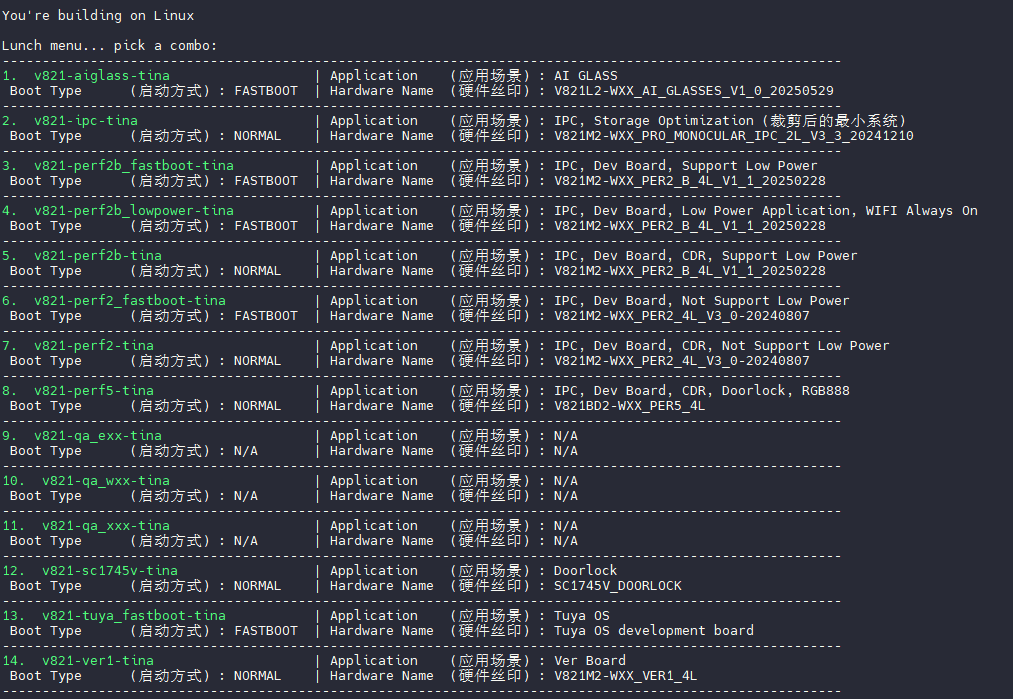
使用命令 lunch 选择编译的方案,这里以选择 v821-perf2-tina 为例,选择 7
选择需要开发的板级后需要选择芯片,请根据芯片丝印型号选择,上面的所有板级都 P2P 支持以下芯片:

选择芯片后需要选择编译的波特率,提供 115200 和 1500000 两个波特率,更高的波特率可以减少 CPU 打印时间占用,增加性能

使用命令 lunch 选择编译的方案,这里以选择 v821-perf2-tina 为例,选择 4
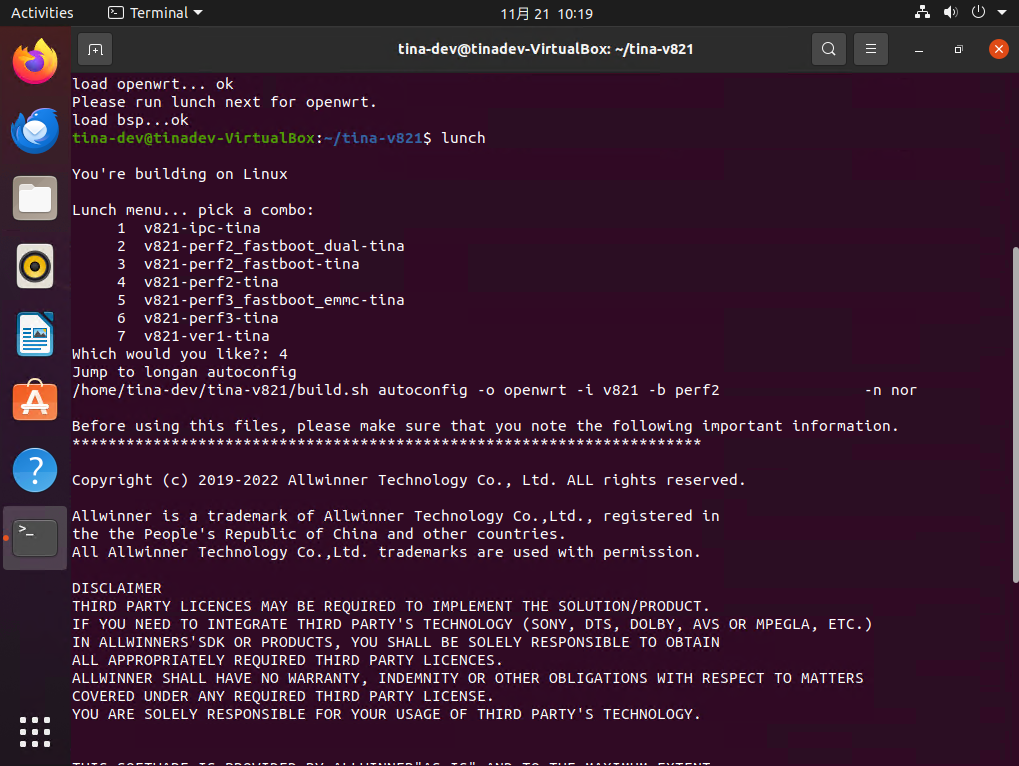
阅读免责声明
如果是一次下载使用SDK,lunch 选择方案后,需要等待8s来阅读免责声明,并按提示输入Y并回车确认接受免责声明。输入之后这份SDK,再做其他操作不会再有这个等待和提示。

等待初始化环境
确认后需要等待 SDK 解压工具链,初始化开发环境
演示
完整编译SDK
使用命令 m 或 make 完整编译 SDK,也可以使用快捷命令 mp 执行编译和打包的动作。可以使用 m -jN 参数N为并行编译进程数量,依赖编译服务器CPU核心数,如 4 核PC,可 m -j4
打包固件
SDK 编译完成,需要使用pack命令打包固件,其会在out目录下输出固件
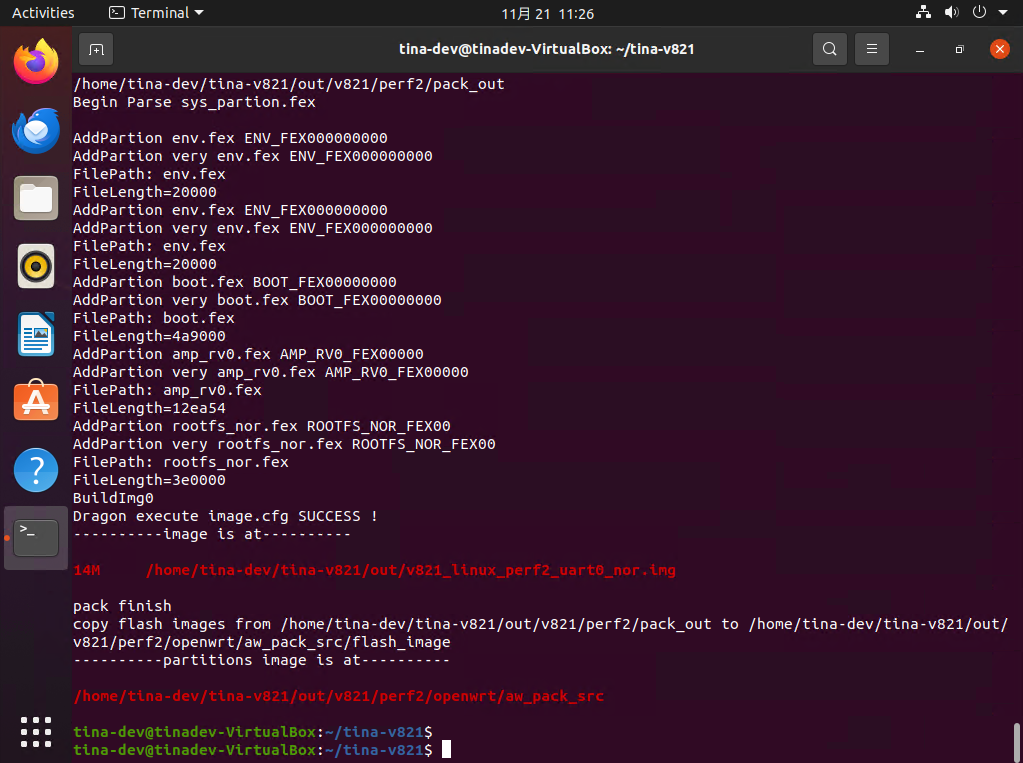
可以在 SDK 目录中的 out 文件夹找到
SDK 组件单独编译
在开发过程中,会需要单独编译某一模块,但是完整编译太慢效率较低,这时可以使用单编命令。
| 命令 | 作用 | 作用范围 |
|---|---|---|
| mboot | 编译boot0和uboot | boot0和uboot |
| mboot0 | 编译boot0 | boot0 |
| muboot | 编译uboot | uboot,uboot设备树 |
| mkernel | 编译内核 | 内核,设备树 |
| mrtos | 编译rtos镜像 | rtos镜像 |
| mkmpp | 编译eyesee-mpp-middleware | eyesee-mpp-middleware |
| cleanmpp | 清除eyesee-mpp-middleware的编译 | eyesee-mpp-middleware |
编译内核与内核设备树
使用命令 mkernel 可以单独编译内核与设备树,之后可以用 p 命令打包固件,编译后的 Kernel 固件会自动拷贝到 out 目录下 out/kernel/build 中
mkernel
编译 RTOS
RTOS 可以使用 mrtos 编译,编译完成后使用 pack 打包,编译后的 RTOS 固件会自动拷贝到 device 目录下对应板级配置中。例如这里使用的 v821-perf2 板,会拷贝到 device/config/chips/v821/configs/perf2/bin/amp_rv0.bin
清理 RTOS 编译
可以使用 mrtos clean 命令清除上一次的 RTOS 编译产物。
编译 U-Boot 与 U-Boot 设备树
U-Boot 可以使用muboot目录编译,编译前会自动执行 clean 清除之前的编译产物。编译完成后使用 pack 打包,输出的 U-Boot 文件会自动拷贝到 device 目录下对应板级配置中。例如这里使用的 v821-perf2 板,会拷贝到 device/config/chips/v821/configs/perf2/bin
muboot
编译 SPL
SPL 可以用 mboot0 来编译,编译前会自动执行 clean 清除之前的编译产物。编译完成后使用 pack 打包,输出的 boot0 文件会自动拷贝到 device 目录下对应板级配置中。例如这里使用的 v821-perf2 板,会拷贝到 device/config/chips/v821/configs/perf2/bin
编译 U-Boot和SPL
可以使用命令 mboot 同时编译 U-boot 和 SPL,编译前会自动执行 clean 清除之前的编译产物。该命令会先编译 U-Boot 然后再编译 SPL
编译 MPP
可以使用 mkmpp 命令单独编译 mpp,请注意编译前需要在 menuconfig 中配置需要编译的软件包
清除 MPP 编译
使用 cleanmpp 命令清除 MPP 编译产物
单独编译某一软件包
SDK 支持单独编译某一软件包,方便加速开发,这里以 mtd-utils 为例,介绍单独编译某一软件包的方法
以 Package 方式编译
make openwrt_rootfs package/mtd-utils/compile
make openwrt_rootfs package/mtd-utils/clean
package是指在openwrt/openwrt/package, 和openwrt/package目录下搜索该软件包。tools是指在openwrt/openwrt/tools下搜索mtd-utils是定义软件包的 Makefile 所在目录的目录名,编译其他软件包时,替换该字段即可compile换成clean是清理软件包编译文件
以路径方式编译
也可以使用软件包 Makefile 所在目录相对于openwrt原生代码根目录的相对路径来直接指定编译软件包
mtd-utils软件包位置:openwrt/openwrt/package/utils/mtd-utils
编译指令:
make openwrt_rootfs package/utils/mtd-utils/compile
make openwrt_rootfs package/utils/mtd-utils/clean
SDK为了区分openwrt原生代码与新增代码,软件包的 Makefile 放在 openwrt/package/ 目录下,但编译时需嵌入到 openwrt 原生代码的标准路径,SDK 使用了软链接方式,将其软链接到 openwrt/openwrt/package/subpackage。这里以 eyesee-mpp-middleware包为例:
-
实际位置:
openwrt/package/allwinner/eyesee-mpp/middleware -
软链接之后的位置:
openwrt/openwrt/package/subpackage/allwinner/eyesee-mpp/middleware
编译指令:
make openwrt_rootfs package/subpackage/allwinner/eyesee-mpp/middleware/compile
make openwrt_rootfs package/subpackage/allwinner/eyesee-mpp/middleware/clean
以快捷指令方式编译
SDK 提供一个快捷指令:mmo 只需要在 mmo 指令后面跟上需要编译的软件包名即可编译
mmo mtd-utils
如果需要清理上一次编译产物,重新编译,则使用 mmo -B 命令
mmo mtd-utils -B
前往文件夹下编译
SDK 也支持在文件夹下编译软件包,例如 mtd-utils 位于 package/utils/mtd-utils,可以前往文件夹单独编译这个软件包
编译指令:
cd openwrt/openwrt/package/utils/mtd-utils
mm # 编译软件包、
mm -B # 先 clean 后重新编译软件包
SDK 快捷命令
SDK 提供了一系列方便开发的快速跳转指令,在开发过程中可以使用这些指令快速跳转目录,执行操作。
| 命令 | 命令有效目录 | 作用 |
|---|---|---|
| make | tina根目录 | 编译整个sdk |
| pack | tina根目录 | 打包固件 |
| m | tina下任意目录 | make的快捷命令,编译整个sdk |
| p | tina下任意目录 | pack的快捷命令,打包固件 |
| m menuconfig | tina下任意目录 | 任意目录启动软件包配置界面 |
| m kernel_menuconfig | tina下任意目录 | 任意目录启动内核配置界面 |
| mrtos menuconfig | tina下任意目录 | 任意目录启动内核配置界面 |
| croot | tina下任意目录 | 快速切换到tina根目录 |
| cconfigs | tina下任意目录 | 快速切换到方案的bsp配置目录 |
| cplat | tina下任意目录 | 快速切换到tina方案配置目录 |
| cout | tina下任意目录 | 快速切换到方案的输出目录 |
| cboot0 | tina下任意目录 | 快速切换到boot0源码目录 |
| cboot | tina下任意目录 | 快速切换到uboot源码目录 |
| ckernel | tina下任意目录 | 快速切换到linux源码目录 |
| cbsp | tina下任意目录 | 快速切换到bsp驱动源码目录 |
| crtos | tina下任意目录 | 快速切换到rtos源码目录 |
| cgrep | tina下任意目录 | 在c/c++/h文件中查找字符串 |
| mm [-B] | 软件包目录 | 编译软件包,-B指编译前先clean |
| cmpp_s | tina下任意目录 | 快速切换到mpp middleware源码目录 |
| cmpp_p | tina下任意目录 | 快速切换到mpp middleware配置目录 |
| clibcedarc_s | tina下任意目录 | 快速切换到libcedarc软件包目录 |
| clibcedarc_p | tina下任意目录 | 快速切换到libcedarc配置目录 |
| crtmedia_s | tina下任意目录 | 快速切换到rt-media源码目录 |
| crtmedia_p | tina下任意目录 | 快速切换到rt-media配置目录 |